Число пар полюсов в генераторе
Генераторы переменного тока
Генератор — устройство, преобразующее один вид энергии в другой.
В данном случае рассматриваем преобразование механической энергии вращения в электрическую.
Различают два типа таких генераторов. Синхронные и асинхронные.
Синхронный генератор. Принцип действия
Отличительным признаком синхронного генератора является жёсткая связь между частотой f переменной ЭДС, наведённой в обмотке статора, и частотой вращения ротора n , называемой синхронной частотой вращения:
n = f / p
где p – число пар полюсов обмотки статора и ротора.
Обычно частота вращения выражается в об/мин, а частота ЭДС в Герцах (1/сек), тогда для количества оборотов в минуту формула примет вид:
n = 60·f / p
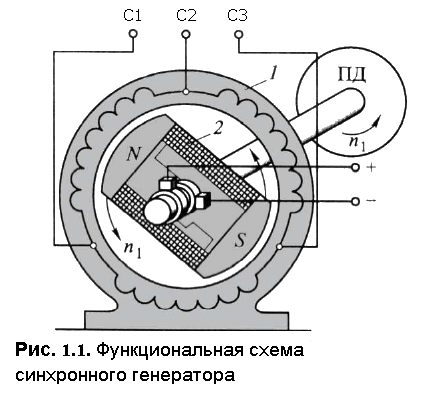 На рис. 1.1 представлена функциональная схема синхронного генератора. На статоре 1 расположена трёхфазная обмотка, принципиально не отличающаяся от аналогичной обмотки асинхронной машины. На роторе расположен электромагнит с обмоткой возбуждения 2, получающей питание постоянным током, как правило, через скользящие контакты, осуществляемые посредством двух контактных колец, расположенных на роторе, и двух неподвижных щёток.
На рис. 1.1 представлена функциональная схема синхронного генератора. На статоре 1 расположена трёхфазная обмотка, принципиально не отличающаяся от аналогичной обмотки асинхронной машины. На роторе расположен электромагнит с обмоткой возбуждения 2, получающей питание постоянным током, как правило, через скользящие контакты, осуществляемые посредством двух контактных колец, расположенных на роторе, и двух неподвижных щёток.
В некоторых случаях в конструкции ротора синхронного генератора вместо электромагнитов могут использоваться постоянные магниты, тогда необходимость в наличии контактов на валу отпадает, но существенно ограничиваются возможности стабилизации выходных напряжений.
Приводным двигателем (ПД), в качестве которого используется турбина, двигатель внутреннего сгорания либо другой источник механической энергии, ротор генератора приводится во вращение с синхронной скоростью. При этом магнитное поле электромагнита ротора также вращается с синхронной скоростью и индуцирует в трёхфазной обмотке статора переменные ЭДС EA , EB и EC , которые будучи одинаковыми по значению и сдвинутыми по фазе относительно друг друга на 1/3 периода (120°), образуют симметричную трёхфазную систему ЭДС.
C подключением нагрузки к зажимам обмотки статора С1, С2 и С3 в фазах обмотки статора появляются токи IA, IB, IC , которые создают вращающееся магнитное поле. Частота вращения этого поля равна частоте вращения ротора генератора. Таким образом, в синхронном генераторе магнитное поле статора и ротор вращаются синхронно. Мгновенное значение ЭДС обмотки статора в рассматриваемом синхронном генераторе
e = 2Blwv = 2πBlwDn
Здесь: B – магнитная индукция в воздушном зазоре между сердечником статора и полюсами ротора, Тл;
l – активная длина одной пазовой стороны обмотки статора, т.е. длина сердечника статора, м;
w – количество витков;
v = πDn – линейная скорость движения полюсов ротора относительно статора, м/с;
D – внутренний диаметр сердечника статора, м.
Формула ЭДС показывает, что при неизменной частоте вращения ротора n форма графика переменной ЭДС обмотки якоря (ста- тора) определяется исключительно законом распределения магнитной индукции B в зазоре между статором и полюсами ротора. Если график магнитной индукции в зазоре представляет собой синусоиду B = Bmax sinα , то ЭДС генератора также будет синусоидальной. В синхронных машинах всегда стремятся получить распределение индукции в зазоре как можно ближе к синусоидальному.
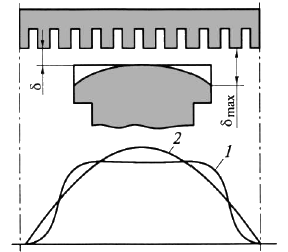 Так, если воздушный зазор δ постоянен (рис. 1.2), то магнитная индукция B в воздушном зазоре распределяется по трапецеидальному закону (график 1). Если же края полюсов ротора «скосить» так, чтобы зазор на краях полюсных наконечников был равен δmax (как это показано на рис. 1.2), то график распределения магнитной индукции в зазоре приблизится к синусоиде (график 2), а, следовательно, и график ЭДС, индуцированной в обмотке генератора, приблизится к синусоиде. Частота ЭДС синхронного генератора f (Гц) пропорциональна синхронной частоте вращения ротора n (об/с)
Так, если воздушный зазор δ постоянен (рис. 1.2), то магнитная индукция B в воздушном зазоре распределяется по трапецеидальному закону (график 1). Если же края полюсов ротора «скосить» так, чтобы зазор на краях полюсных наконечников был равен δmax (как это показано на рис. 1.2), то график распределения магнитной индукции в зазоре приблизится к синусоиде (график 2), а, следовательно, и график ЭДС, индуцированной в обмотке генератора, приблизится к синусоиде. Частота ЭДС синхронного генератора f (Гц) пропорциональна синхронной частоте вращения ротора n (об/с)
где p – число пар полюсов.
В рассматриваемом генераторе (см. рис.1.1) два полюса, т.е. p = 1.
Для получения ЭДС промышленной частоты (50 Гц) в таком генераторе ротор необходимо вращать с частотой n = 50 об/с (n = 3000 об/мин).
Способы возбуждения синхронных генераторов
Самым распространенным способом создания основного магнитного потока синхронных генераторов является электромагнитное возбуждение, состоящее в том, что на полюсах ротора располагают обмотку возбуждения, при прохождении по которой постоянного тока, возникает МДС, создающая в генераторе магнитное поле. До последнего времени для питания обмотки возбуждения применялись преимущественно специальные генераторы постоянного тока независимого возбуждения, называемые возбудителями В (рис. 1.3, а). Обмотка возбуждения (ОВ) получает питание от другого генератора (параллельного возбуждения), называемого подвозбудителем (ПВ). Ротор синхронного генератора, возбудителя и подвозбудителя располагаются на общем валу и вращаются одновременно. При этом ток в обмотку возбуждения синхронного генератора поступает через контактные кольца и щётки. Для регулирования тока возбуждения применяют регулировочные реостаты, включаемые в цепи возбуждения возбудителя r1 и подвозбудителя r2 . В синхронных генераторах средней и большой мощности процесс регулирования тока возбуждения автоматизируют.
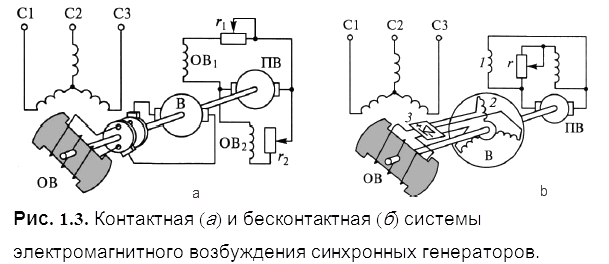
В синхронных генераторах получила применение также бесконтактная система электромагнитного возбуждения, при которой синхронный генератор не имеет контактных колец на роторе. В качестве возбудителя в этом случае применяют обращенный синхронный генератор переменного тока В (рис. 1.3, б). Трехфазная обмотка 2 возбудителя, в которой наводится переменная ЭДС, расположена на роторе и вращается вместе с обмоткой возбуждения синхронного генератора и их электрическое соединение осуществляется через вращающийся выпрямитель 3 непосредственно, без контактных колец и щёток. Питание постоянным током обмотки возбуждения 1 возбудителя В осуществляется от подвозбудителя ПВ – генератора постоянного тока. Отсутствие скользящих контактов в цепи возбуждения синхронного генератора позволяет повысить её эксплуатационную надёжность и увеличить КПД.
В синхронных генераторах, в этом числе гидрогенераторах, получил распространение принцип самовозбуждения (рис. 1.4, а), когда энергия переменного тока, необходимая для возбуждения, отбирается от обмотки статора синхронного генератора и через понижающий трансформатор и выпрямительный полупроводниковый преобразователь ПП преобразуется в энергию постоянного тока. Принцип самовозбуждения основан на том, что первоначальное возбуждение генератора происходит за счёт остаточного магнетизма машины.
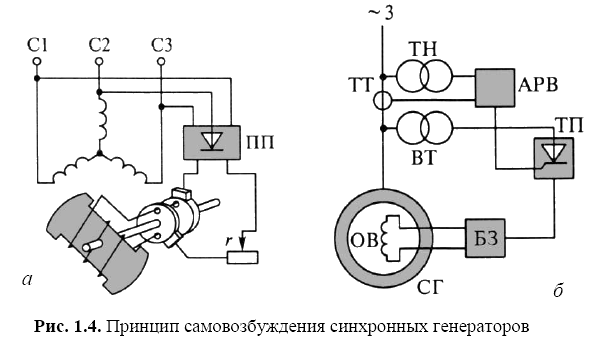
На рис. 1.4, б представлена структурная схема автоматической системы самовозбуждения синхронного генератора (СГ) с выпрямительным трансформатором (ВТ) и тиристорным преобразователем (ТП), через которые электроэнергия переменного тока из цепи статора СГ после преобразования в постоянный ток подаётся в обмотку возбуждения. Управление тиристорным преобразователем осуществляется посредством автоматического регулятора возбуждения АРВ, на вход которого поступают сигналы напряжения на входе СГ (через трансформатор напряжения ТН) и тока нагрузки СГ (от трансформатора тока ТТ). Схема содержит блок защиты (БЗ), обеспечивающий защиту обмотки возбуждения (ОВ) от перенапряжения и токовой перегрузки.
Мощность, затрачиваемая на возбуждение, обычно составляет от 0,2 до 5 % полезной мощности (меньшее значение относится к генераторам большой мощности).
В генераторах малой мощности находит применение принцип возбуждения постоянными магнитами, расположенными на роторе машины. Такой способ возбуждения даёт возможность избавить генератор от обмотки возбуждения. В результате конструкция генератора существенно упрощается, становится более экономичной и надёжной. Однако, из-за высокой стоимости материалов для изготовления постоянных магнитов с большим запасом магнитной энергии и сложности их обработки применение возбуждения постоянными магнитами ограничено машинами мощностью не более нескольких киловатт.
Синхронные генераторы составляют основу электроэнергетики, так как практически вся электроэнергия во всём мире вырабатывается посредством синхронных турбо- или гидрогенераторов.
Так же синхронные генераторы находят широкое применение в составе стационарных и передвижных электроустановок или станций в комплекте с дизельными и бензиновыми двигателями.
Асинхронный генератор. Отличия от синхронного
Асинхронные генераторы принципиально отличаются от синхронных отсутствием жесткой зависимости между частотой вращения ротора и вырабатываемой ЭДС. Разницу между этими частотами характеризует коэффициент s — скольжение.
здесь:
n — частота вращения магнитного поля (частота ЭДС).
n r — частота вращения ротора.
Более подробно с расчётом скольжения и частоты можно ознакомиться в статье: асинхронные генераторы. Частота.
В обычном режиме электромагнитное поле асинхронного генератора под нагрузкой оказывает тормозной момент на вращения ротора, следовательно, частота изменения магнитного поля меньше, поэтому скольжение будет отрицательным. К генераторам, работающим в области положительных скольжений, можно отнести асинхронные тахогенераторы и преобразователи частоты.
Асинхронные генераторы в зависимости от конкретных условий применения выполняются с короткозамкнутым, фазным или полым ротором. Источниками формирования необходимой энергии возбуждения ротора могут являться статические конденсаторы или вентильные преобразователи с искусственной коммутацией вентилей.
Асинхронные генераторы можно классифицировать по способу возбуждения, характеру выходной частоты (изменяющаяся, постоянная), способу стабилизации напряжения, рабочим областям скольжения, конструктивному выполнению и числу фаз.
Последние два признака характеризуют конструктивные особенности генераторов.
Характер выходной частоты и методы стабилизации напряжения в значительной степени обусловлены способом образования магнитного потока.
Классификация по способу возбуждения является основной.
Можно рассмотреть генераторы с самовозбуждением и с независимым возбуждением.
Самовозбуждение в асинхронных генераторах может быть организовано:
а) с помощью конденсаторов, включенных в цепь статора или ротора или одновременно в первичную и вторичную цепи;
б) посредством вентильных преобразователей с естественной и искусственной коммутацией вентилей.
Независимое возбуждение может осуществляться от внешнего источника переменного напряжения.
По характеру частоты самовозбуждающиеся генераторы разделяются на две группы. К первой из них относятся источники практически постоянной (или постоянной) частоты, ко второй переменной (регулируемой) частоты. Последние применяются для питания асинхронных двигателей с плавным изменением частоты вращения.
Более подробно рассмотреть принцип работы и конструктивные особенности асинхронных генераторов планируется рассмотреть в отдельных публикациях.
Асинхронные генераторы не требуют в конструкции сложных узлов для организации возбуждения постоянным током или применения дорогостоящих материалов с большим запасом магнитной энергии, поэтому находят широкое применение у пользователей передвижных электроустановок по причине своей простоты и неприхотливости в обслуживании. Используются для питания устройств, не требующих жёсткой привязки к частоте тока.
Техническим достоинством асинхронных генераторов можно признать их устойчивость к перегрузкам и коротким замыканиям.
С некоторой информацией по мобильным генераторным установкам можно ознакомиться на странице:
Дизель-генераторы.
Асинхронный генератор. Характеристики.
Асинхронный генератор. Стабилизация.
Замечания и предложения принимаются и приветствуются!
Принцип работы и устройство синхронного генератора переменного тока
Электричество – единственный вид энергии, которую легко можно передать на большие расстояния, а затем преобразовать её в механическую, тепловую или превратить в световое излучение. Саму же электроэнергию также можно получить разными способами: химическим, тепловым, механическим, фотоэлектрическим и др. Но именно механический способ, который основан на применении генераторов, оказался самым эффективным. Среди этих источников электроэнергии широкое применение нашёл синхронный генератор переменного тока.
Практически вся электроэнергия, используемая в быту и на производстве, вырабатывается генераторами этого типа. Они заслуживают того, чтобы более подробно рассмотреть их устройство и разобраться в принципе работы этих удивительных синхронных машин.
Устройство
В конструкции синхронных генераторов используются две основные рабочие детали – вращающийся ротор и неподвижный статор. На валу ротора располагаются постоянные магниты либо обмотки возбуждения. Магниты имеют зубчатую форму, с противоположно направленными полюсами.
Бесщёточные генераторы.
Обмотки статора размещают таким образом, чтобы их сердечники совпадали с выступами магнитных полюсов ротора, или с сердечниками катушек ротора. Количество зубцов магнита, обычно, не превышает 6. При такой конструкции вырабатываемый ток снимается непосредственно с обмоток статоров. Другими словами, статор выступает в роли якоря.
В принципе, постоянные магниты можно расположить на статоре, а рабочие обмотки, в которых будет индуцироваться ЭДС, — на роторе. Работоспособность генератора от этого не изменится, однако потребуются кольца и щётки для снятия напряжения с обмоток якоря, а это, чаще всего, не рационально.
Схематическое изображение бесщеточного генератора без обмоток возбуждения изображено на рис. 1.
 Рис. 1. Модель генератора с магнитным ротором
Рис. 1. Модель генератора с магнитным ротором
Пояснение:
- схема устройства;
- схема расположения магнитных полюсов на якоре. Здесь буквами NS обозначено коаксиальный магнит с полюсами, а литерой R – стальной магнитопровод ротора в виде когтеобразных наконечников.
- модель генератора в разрезе. Выводы фазных обмоток статора соединены «звездой».
Синхронные машины с индукторами.
Заметим, что постоянные магниты в качестве ротора используются в альтернаторах небольшой мощности. В мощных электрических машинах всегда применяются обмотки индуктора с независимым возбуждением. Независимым источником питания является маломощный генератор постоянного тока, смонтированный на валу синхронного двигателя.
Существуют конструкции синхронных генераторов малой и средней мощности, с самовозбуждающимися обмотками. Для возбуждения индуктора выпрямленный ток фазных обмоток подаётся через щётки на кольца, расположенные на валу статора. Строение такого альтернатора показано на рис. 2.
 Рис. 2. Строение синхронного генератора средней мощности
Рис. 2. Строение синхронного генератора средней мощности
Обратите внимание на наличие щёток, на которые подаётся питания от независимого источника.
По количеству фаз синхронные генераторы делятся на:
- однофазные;
- двухфазные;
- трёхфазные.
По конструкции ротора можно выделить генераторы с явновыраженными полюсами и с неявновыраженными. В неявнополюсном роторе отсутствуют выступы, а катушки провода якоря спрятаны в пазы статора.
По способу соединения фазных обмоток различают трёхфазные генераторы:
- соединённые по шестипроводной системе Тесла (не нашли практического применения);
- «звезда»;
- «треугольник»;
- сочетание шести обмоток, соединённых в виде одной «звезды» и «треугольника». Это соединение ещё называют «Славянка».
Самое распространённое соединение – «звезда» с нейтральным проводом.
Принцип работы
Рассмотрим принцип генерации тока на примере контурной рамки, помещённой между магнитными полюсами. (Рис. 3)
 Рис. 3. Схема, объясняющая принцип работы генератора
Рис. 3. Схема, объясняющая принцип работы генератора
Если заставить рамку вращаться (по направлению стрелок), то она будет пересекать магнитные силовые линии. При этом, по закону электромагнитной индукции, в рамке индуцируется электрический ток, который проявляется при подключении нагрузки к щёткам. Его направление можно определить по правилу буравчика. На схеме направление тока показано чёрными стрелками.
Обратите внимание на то, что на участках рамки ab и cd ток движется в противоположных направлениях. Эти направления меняются при переходе участков рамки от одного полюса к другому полюсу магнита. Если каждый вывод рамки подключить к отдельному кольцу (на рисунке они подключены к коллектору!), то на выходе мы получим переменный ток.
Величина тока пропорциональна скорости вращения ротора. Кроме того, переменный ток характеризуется ещё одним параметром – частотой. Эта величина напрямую зависит от частоты вращения вала.
Частота тока в электросетях строго соблюдается. В России и в ряде других стран она составляет 50 Гц, то есть 50 колебаний в секунду.
Этот параметр довольно легко вычислить из таких соображений: за один оборот рамки (или двухполюсного магнита) происходит одно изменение направления тока. Если вал синхронного генератора делает 1 оборот в секунду, то частота переменного тока составит 1 Гц. Для получения частоты 50 Гц необходимо обеспечить 50 оборотов статора в секунду или 3000 об./мин.
При возрастании числа полюсов заданная частота удерживается путём снижения скорости вращения статора. (обратно пропорциональная зависимость). Так, для четерёхполюсного статора (число полюсов в два раза больше) для поддержания частоты 50 Гц скорость вращения вала необходимо снизить в два раза. Соответственно если используется 6 полюсов, то частота вращения вала должна уменьшиться в три раза – до 1000 об./мин.
Заметим, что в некоторых странах, таких как США, Япония и др. существуют другие стандарты – 60 Гц, а переменный 400 Гц используется, например, в бортовой сети современных самолётов.
Регулирование частоты
Достигнуть требуемых параметров частоты можно 2 путями:
- Сконструировать генератор с определённым количеством полюсов электромагнитов.
- Обеспечить соответствующую расчётную частоту вращения вала.
Например, в тихоходных гидротурбинах, вращающихся со скоростью 150 об./мин. для регулирования частоты число полюсов синхронных генераторов увеличивают до 40. На дизельных электростанциях, при скоростях вращения 750 об./мин., оптимальное число полюсов – 8.
Регулирование ЭДС
В связи с изменениями параметров активных нагрузок возникает необходимость в выравнивании номинальных напряжений. Несмотря на то, что ЭДС индукции синхронного генератора связана со скоростью вращения ротора, однако, из-за требований по соблюдению стабильной частоты, этим способом нельзя изменять указанный параметр. Но параметры магнитной индукции можно изменить путём снижения или увеличения магнитного потока, который зависит от количества витков обмотки индуктора и величины тока возбуждения.
Регулирование осуществляется путём включения в цепь катушек возбуждения дополнительных реостатов, электронных схем или регулировкой тока генератора-возбудителя (Рис. 4). В случае использования альтернаторов с постоянными магнитами, в таких устройствах напряжение регулируется внешними стабилизаторами.
 Рис. 4. Схема регулировки напряжения
Рис. 4. Схема регулировки напряжения
Благодаря малому весу и отличным токовым характеристикам синхронные генераторы переменного тока нашли применение во всех современных автомобилях. Поскольку бортовая сеть авто использует постоянный ток, конструкции автомобильных генераторов оборудованы трехфазным выпрямителем. Для выпрямляемых переменных токов частота не имеет значения, а вот напряжение должно быть стабильно. Этого добиваются с помощью внешних электронных устройств. На рисунке 5 представлена электрическая схема подключения генератора к бортовой сети современного автомобиля.
 Рис. 5. Схема подключения генератора к бортовой сети авто
Рис. 5. Схема подключения генератора к бортовой сети авто
Применение
У синхронных генераторов переменного тока есть одна важная особенность: они поддаются синхронизации с другими подобными электрическими машинами. При этом синхронные скорости и ЭДС параллельно включенных альтернаторов совпадают, а фазовый сдвиг равен нулю. Данное обстоятельство позволяет применять устройства в промышленной энергетике и подключать резервные генераторы при превышении номинальных мощностей в часы пиковых нагрузок.
Трёхфазные тяговые генераторы применяют на тепловозах. Переменные токи для питания двигателей выпрямляются полупроводниковыми устройствами. Сегодня в России уже выпускаются тепловозы на базе асинхронных электродвигателей, не требующих выпрямления тока. В режиме торможения они работают в качестве асинхронных генераторов.
Синхронные генераторы устанавливают на гибридных автомобилях с целью совмещения тяги ДВС и мощности тяговых электродвигателей. Развивая активную мощность при номинальных нагрузках, они позволяют экономить дорогое топливо.
Существует много других сфер применения. Например, мобильные мини-электростанции, бытовые генераторы тока, как однофазный двигатель и т. п.
Число пар полюсов в генераторе
Воропаев Е.Г.
Электротехника
Если в рассмотренных выше асинхронных машинах ротор имел частоту вращения, отличную от частоты вращения магнитного поля статора, то в синхронных эти частоты равны между собой.
Синхронные машины могут работать как генераторами, так и двигателями.
В зависимости от типа привода синхронные генераторы получили и свои названия.
Турбогенератор, например, — это генератор, приводимый в движение паровой турбиной, гидрогенератор вращает водяное колесо, а дизель — генератор механически связан с двигателем внутреннего сгорания.
Синхронные двигатели широко применяют для привода мощных компрессоров, насосов, вентиляторов.
Синхронные микродвигатели используют для привода лентопротяжных механизмов регистрирующих приборов, магнитофонов и т.д.
6.1. КОНСТРУКЦИЯ И ПРИНЦИП ДЕЙСТВИЯ СИНХРОННОГО ГЕНЕРАТОРА
Статор синхронной машины по конструкции не отличается от статора асинхронного двигателя. В пазах статора размещается трехфазная, двухфазная или однофазная обмотки.
Заметное отличие имеет ротор, который принципиально представляет собой постоянный магнит или электромагнит.
Это налагает особые требования на геометрическую форму ротора. Любой магнит имеет полюса, число которых может быть два и более.
На рис. 6.1.1 приведены две конструкции генераторов, с тихоходным и быстроходным ротором.

Быстроходными бывают, как правило, турбогенераторы. Количество пар магнитных полюсов у них равно единице. Чтобы такой генератор вырабатывал электрический ток стандартной частоты f = 50 Гц, его необходимо вращать с частотой

На гидроэлектростанциях вращение ротора зависит от движения водяного потока. Но и при медленном вращении такой генератор должен вырабатывать электрический ток стандартной частоты f = 50 Гц.
Поэтому для каждой гидроэлектростанции конструируется свой генератор, на определенное число магнитных полюсов на роторе.
В качестве примера приведем параметры синхронного генератора, работающего на Днепровской ГЭС.
Водяной поток вращает ротор генератора с частотой n = 33,3 об / мин. Задавшись частотой f = 50 Гц, определим число пар полюсов на роторе:

Принцип действия синхронного генератора основан на явлении электромагнитной индукции. Ротор с магнитными полюсами создает вращающееся магнитное поле, кото-рое, пересекая обмотку статора, наводит в ней ЭДС. При подключении к генератору нагрузки генератор будет являться источником переменного тока.
6.2. ЭДС СИНХРОННОГО ГЕНЕРАТОРА
Как было показано выше, величина наводимой в обмотке статора ЭДС количественно связана с числом витков обмотки и скорости изменения магнитного потока:

Переходя к действующим значениям, выражение ЭДС можно записать в виде:

где n — частота вращения ротора генератора,
Ф — магнитный поток,
c — постоянный коэффициент.
При подключении нагрузки напряжение на зажимах генератора в разной степени меняется. Так, увеличение активной нагрузки не оказывает заметного влияния на напряжение. В то же время индуктивная и емкостная нагрузки влияют на выходное на-пряжение генератора. В первом случае рост нагрузки размагничивает генератор и снижает напряжение, во втором происходит его подмагничивание и повышение напряжения. Такое явление называется реакцией якоря.
Для обеспечения стабильности выходного напряжения генератора необходимо регулировать магнитный поток. При его ослаблении машину надо подмагнитить, при увеличении — размагнитить. Делается это путем регулирования тока, подаваемого в обмотку возбуждения ротора генератора.
6.3. СИНХРОННЫЙ ДВИГАТЕЛЬ
6.3.1. КОНСТРУКЦИЯ И ПРИНЦИП ДЕЙСТВИЯ
Конструкция синхронного двигателя такая же, как и у синхронного генератора.
При подаче тока в трехфазную обмотку статора в нем возникает вращающееся магнитное поле. Частота вращения его определяется формулой:

где f — частота тока питающей сети,
р — число пар полюсов на статоре.
Ротор, являющийся часто электромагнитом, будет строго следовать за вращаю-щимся магнитным полем, т.е. его частота вращения n2 = n1.
Рассмотрим принцип действия синхронного двигателя на следующей условной модели (рис. 6.3.1.). Пусть магнитное поле статора будет смоделировано системой вращающихся магнитных полюсов N — S.

Ротор двигателя тоже представляет собой систему электромагнитов S — N, кото-рые «сцеплены» с полюсами на статоре. Если нагрузка на двигателе отсутствует, то оси полюсов статора будут совпадать с осями полюсов ротора (  = 0).
= 0).
Если же к ротору подключена механическая нагрузка, то оси полюсов статора и ротора могут расходиться на некоторый угол .
Однако «магнитное сцепление» ротора со статором будет продолжаться, и частота вращения ротора будет равна синхронной частоте статора (n2 = n1). При больших значениях ротор может выйти из «сцепления» и двигатель остановится.
Главное преимущество синхронного двигателя перед асинхронным — это обеспечение синхронной скорости вращения ротора при значительных колебаниях нагрузки.
6.3.2. СИСТЕМА ПУСКА СИНХРОННОГО ДВИГАТЕЛЯ
Как мы показали выше, синхронное вращение ротора обеспечивается «магнитным сцеплением» полюсов ротора с вращающимся магнитным полем статора.
В первый момент пуска двигателя вращающееся магнитное поле статора возникает практически мгновенно. Ротор же, обладая значительной инерционной массой, прийти в синхронное вращение сразу не сможет. Его надо «разогнать» до подсинхронной скорости каким-то дополнительным устройством.
Долгое время роль разгонного двигателя играл обычный асинхронный двигатель, механически соединенный с синхронным.
Ротор синхронного двигателя приводится во вращение до подсинхронной скорости. Далее двигатель сам втягивается в синхронизм.
Обычно мощность пускового двигателя составляет 5-15 % от мощности синхронного двигателя. Это позволяет пускать в ход синхронный двигатель только вхолостую или при малой нагрузке на валу.
Применение пускового двигателя мощностью, достаточной для пуска синхронного двигателя под нагрузкой делает такую установку громоздкой и дорогой.
В последнее время используется так называемая система асинхронного пуска синхронных двигателей. С этой целью в полюсные наконечники забивают стержни, напоминающие собою короткозамкнутую обмотку асинхронного двигателя (рис. 6.3.2.1).

В начальный период пуска синхронный двигатель работает как асинхронный, а в последующем — как синхронный. В целях безопасности обмотку возбуждения в начальном периоде пуска закорачивают, а на заключительном подключают к источнику по-стоянного тока.
6.4. РЕАКТИВНЫЙ СИНХРОННЫЙ ДВИГАТЕЛЬ
В лабораторной практике, в быту и в маломощных механизмах применяют так называемые реактивные синхронные двигатели.
От обычных классических машин они отличаются лишь конструкцией ротора. Ротор здесь не является магнитом или электромагнитом, хотя по форме напоминает собой полюсную систему.
Принцип действия реактивного синхронного двигателя отличен от рассмотренного выше. Здесь работа двигателя основана, на свободной ориентации ротора таким образом, чтобы обеспечить магнитному потоку статора лучшую магнитную проводимость (рис. 6.4.1).

Действительно, если в какой-то момент времени максимальный магнитный поток будет в фазе А — X, то ротор займет положение вдоль потока ФА. Через 1/3 периода максимальным будет поток в фазе В — У. Тогда ротор развернется вдоль потока ФВ. Еще через 1/3 периода произойдет ориентация ротора вдоль потока. ФС. Так непрерывно и синхронно ротор будет вращаться с вращающимся магнитным полем статора.
В школьной практике иногда, при отсутствии специальных синхронных двигателей, возникает необходимость в синхронной передаче.
Эту проблему можно решить с помощью обычного асинхронного двигателя, если придать ротору следующую геометрическую форму (рис. 6.4.2).

6.5. ШАГОВЫЙ ДВИГАТЕЛЬ
Этот тип двигателя является машиной постоянного тока, хотя принцип действия его напоминает синхронный реактивный двигатель.
Как видно из рис. 6.5.1, статор двигателя имеет шесть пар выступающих полюсов.

Каждые две катушки, расположенные на противоположных полюсах статора, образуют обмотку управления, включаемую, в сеть постоянного тока. Ротор — двухполюсный.
Если подключить к источнику постоянного тока катушки полюсов 1 — 1′, то ротор расположится вдоль этих полюсов. Если задействовать катушки полюсов 2 — 2′, а ка-тушки полюсов 1 — 1′ обесточить, то ротор повернется и займет положение вдоль полю-сов 2 — 2′. Такой же поворот ротора произойдет, если включить в сеть катушки полюсов 3 — 3′. Так, шагами, ротор будет «следовать» за своей обмоткой управления.
Преимуществом шаговых двигателей является то, что в них совершенно отсутствует «самоход». Они поворачиваются и строго фиксируются с шагом, пропорциональ-ным числу полюсов на статоре. Это качество делает его незаменимым в особо точных механизмах (для привода часов, механизмов подачи ядерного топлива в реакторах, в станках с ЧПУ и т.д.).
Управление шаговыми двигателями ведется с применением различных электронных устройств (триггеров Шмидта и др.).
6.6. КОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА
Безколлекторные асинхронные и синхронные двигатели при многих положительных качествах имеют существенные недостатки. Они не допускают достаточно плавного и экономичного регулирования вращения.
Этот пробел частично восполняют коллекторные двигатели переменного тока.
Коллекторные двигатели бывают однофазными и трехфазными.
Ротор однофазного коллекторного двигателя выполнен в виде цилиндра с фазными обмотками, статор — явнополюсный.
Так как обмотка полюсов статора, подключаемая к сети переменного тока, создает пульсирующее магнитное поле, то все элементы магнитной цепи машины набираются из отдельных листов электротехнической стали.
Вращающий момент в однофазном коллекторном двигателе создается взаимодействием токов в обмотке ротора с магнитным потоком полюсов. На рис. 6.6.1- показана схема подключения к сети коллекторного двигателя.

Коллекторные двигатели могут работать как от сети переменного тока, так и от сети постоянного тока. Это обстоятельство послужило для присвоения им наименования универсальных коллекторных двигателей. Коллекторные двигатели широко при-меняются для привода швейных машин, пылесоса и т.д.
Число пар полюсов в генераторе




| Текущее время: Сб окт 09, 2021 11:17:57 |
Часовой пояс: UTC + 3 часа
какая частота у автомобильного генератора
  |
Страница 1 из 2 | [ Сообщений: 21 ] | На страницу 1 , 2 След. |
|
у вас что-газотурбинный. а автогенетратор точно ПЕРЕМЕННЫЙ ТОК вырабатывает? _________________ JLCPCB, всего $2 за прототип печатной платы! Цвет — любой! Зарегистрируйтесь и получите два купона по 5$ каждый:https://jlcpcb.com/cwc Сборка печатных плат от $30 + БЕСПЛАТНАЯ доставка по всему миру + трафарет Приглашаем всех желающих 13 октября 2021 г. посетить вебинар, посвященный искусственному интеллекту, машинному обучению и решениям для их реализации от Microchip. Современные среды для глубинного обучения нейронных сетей позволяют без детального изучения предмета развернуть искусственную нейронную сеть (ANN) не только на производительных микропроцессорах и ПЛИС, но и на 32-битных микроконтроллерах. А благодаря широкому портфолио Microchip, включающему в себя диапазон компонентов от микроконтроллеров и датчиков до ПЛИС, средств скоростной передачи и хранения информации, возможно решить весь спектр задач, возникающий при обучении, верификации и развёртывании модели ANN. Компания TRACO представила ультракомпактные ИП, монтируемые на печатную плату. В семейство входят три серии с выходной мощностью 3, 5 и 10 Вт. Особенность серий – малогабаритность; серии на 3 и 5 Вт имеют посадочный размер 1″x1″ (25,4×25,4 мм), а модели на 10 Вт имеют размер 1,5″х1″ (38,5х25,4 мм). При этом эти серии ИП обладают усиленной изоляцией и предназначены для широкого применения в различных приложениях.
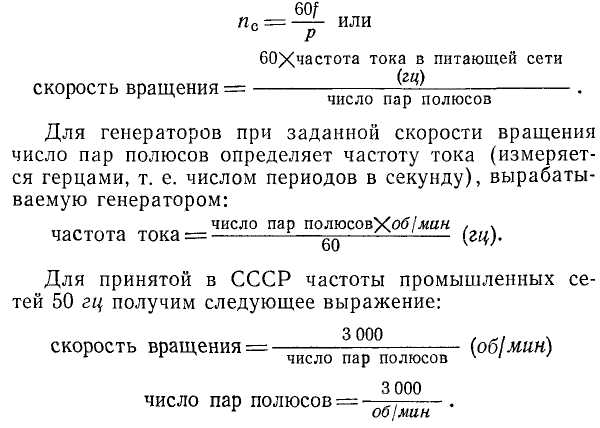
_________________ Для тех кто сильно путаются и хотят формулы. Обороты у нас считаются в минуту, а Герцы это такты в секунду. А теперь давайте считать частоту. Если двигатель(генератор) 2 полюсной, тогда за одно вращение получим один такт и частота будет равна оборотам, то есть 216,7Гц Вот и считайте частоту. Хочу заметить что не первая часть расчетов не правильна и не вторая, зато результат розеткина верный вы сами написали пар полюсов p: 6 полюсной это и значит 3 пары полюсов. Пара в русском языке значит 2, а не один. Вы приводите правильную формулу, а вводите фиктивные данные, а потом вопросы все ли верно? Последний раз редактировалось amd9800 Сб фев 27, 2016 01:28:39, всего редактировалось 1 раз. Часовой пояс: UTC + 3 часа Кто сейчас на форумеСейчас этот форум просматривают: нет зарегистрированных пользователей и гости: 6 Число пар полюсов в генераторе3-1. ЧИСЛО ПАР ПОЛЮСОВ. ШАГ ВИТКА Для двигателей переменного тока (асинхронных и синхронных) число пар полюсов определяет скорость вращения, т. е. число оборотов в минуту. Оно определяется из следующей зависимости:
У асинхронных двигателей приведенное выше выражение определяет «синхронную» скорость вращения, которую двигатель развивает без нагрузки. При нагрузке скорость вращения незначительно замедляется, появляется так называемое «скольжение». Скольжение представляет собой разность между синхронным и действительным числом оборотов ротора в минуту, разделенную на синхронное число оборотов в минуту:
Величина скольжения при номинальной нагрузке для обычных асинхронных двигателей колеблется в пределах 2—3%, для асинхронных двигателей с повышенным скольжением она может достигать 10% и более при номинальной нагрузке. Для того, чтобы синхронный генератор мог работать, число пар полюсов индуктора и рабочей обмотки 1 должно быть одинаковым; то же относится к асинхронному двигателю с фазным ротором, у которого обмотки статора и ротора должны иметь одинаковое число пар полюсов. Короткозамкнутый ротор асинхронного двигателя может работать при различном числе полюсов статорной обмотки. Для того чтобы в обмотке образовалось требуемое число пар полюсов р, необходимо соединить проводники в витки-катушки (секции) и катушки между собой так, чтобы были выдержаны определенные расстояния — «шаги» между сторонами (проводниками) витка-катушки и между самими катушками или их группами. Шаг витка должен быть равен полюсному делению (диаметральный шаг) или несколько меньше его (укороченный шаг). Полюсное деление х выражается числом пазов (или зубцов), приходящихся на полюс: Шаг витка У также выражается числом пазов, лежащих между проводниками, образующими стороны витка. Шаг витка должен быть близок к полюсному делению. Если, например, нужно обмотать статор (ротор), имеющий 48 пазов, так, чтобы получить четырехполюс-ную обмотку, то полюсное деление будет равно: Шаг катушек, следовательно, может быть взят равным 12 пазам или несколько меньше, например 10 пазам. 1 Рабочей (якорной) обмоткой генератора может быть как статорная, так и роторная. В последнем случае вырабатываемый ток подается через контактные кольца и щегки. В первом случае стороны катушки расположатся в пазах 1 и 1 + 12=13, во втором случае — в пазах 1 и 1 + 10=11. В первом случае будем иметь обмотку с диаметральным шагом катушек, во втором случае — обмотку с укороченным шагом, равным 10/12, или 83% диаметрального. Укорочение составит, следовательно, 17% диаметрального шага. Укорочение шага приводит к некоторому уменьшению э. д. с. (электродвижущей силы) витка, так как уменьшается его площадь, а следовательно, и охватываемый им магнитный поток, однако оно является весьма полезным, так как уменьшает длину лобовых соединений и в результате расход меди и потери в обмотке и, кроме того, улучшает форму кривой э. д. с. Наиболее благоприятной формой кривой э. д. с. (т. е. кривой, которая изображает зависимость величины э. д. с. от времени) является синусоида. В этом случае электрические машины имеют минимальные потери и наилучшие характеристики. Форма кривой э. д. с. зависит от формы кривой магнитного потока, который эту э. д. с. индуцирует. Придать точно синусоидальную форму кривой магнитного потока весьма затруднительно, поэтому желательно, чтобы обмотка даже при несинусоидальном магнитном потоке давала бы синусоидальную э. д. с. Несинусоидальный магнитный поток можно представить себе состоящим из основного изменяющегося точно по синусоиде (он называется потоком первой гармоники) и имеющего заданное для машины число пар полюсоь и наложенных на него также синусоидальных потоков (т. н. высших гармонических) с числом пар полюсов в 2, 3, 4, 5, . . ., п раз больше основного. Соответственно полюсное деление потоков высших гармонических в 2, 3, 4, 5, . . ., п раз меньше основного. В машинах, у которых северные и южные полюсы одинаковы, имеют место только иечетные 3, 5, 7, 9 и т. д. гармонические. Если укорочение шага составляет, напри-мер, 75=20% полюсного деления, то для 5-й гармонической это означает укорочение на 100%, т. е. целиком на однб полюсное деление 5-й гармонической. При этом виток будет охватывать две положительные и две отри- цательные полуволны 5-й гармоники и, следовательно, общий поток 5-й гармонической, охватываемой витком, и э. д. с. 5-й гармоники будут равны нулю. Аналогичное положение создается для 3-й гармоники, если укоротить шаг на ‘/з полюсного деления. Поэтому при относительно небольшом уменьшении основной э. д. с. можно в сильной степени уменьшить э. д. с. от высших гармоник и получить, следовательно, близкую к синусоидальной э. д. с. витка. При слишком большом укорочении шага начинает превалировать уже уменьшение основной э. д. с, что недопустимо. Поэтому укорочение шага обычно не превышает Уз полюсного деления, т. е. шаг не берется менее 0,66 полюсного деления. Исключения составляют специальные обмотки, например обмотки для переключения на два числа полюсов. В связи с тем что обмотки размещаются в пазах и проводимость воздушного зазора между зубцами и между пазами статора и ротора для магнитного потока получается различной (в особенности при открытых пазах), в кривой магнитного потока появляются так называемые зубцовые гармоники, отражающие пульсацию потока из-за изменения проводимости воздушного зазора. Очевидно, что исключить эти гармонические за счет укорочения шага нельзя, так как двойное полюсное деление зубцовой гармоники равно зубцовому делению и укорочение шага, равное полюсному делению этой гармоники означает необходимость положить виток, не в паз, а на зубец. Радикальным способом борьбы с зубцовыми гармониками является скос пазов. Зубцовые гармоники могут быть уменьшены также за счет применения обмоток с дробным числом пазов на полюс и на фазу. При выполнении обмоток стремятся обычно распределить витки на возможно большее число пазов, которые при этом получаются меньше. Такое распределение обмотки позволяет получить меньший поток рассеяния, т. е. вредный для работы машины магнитный поток, который не проходит из ста-гора в ротор, а замыкается вокруг паза. Кроме того, сами зубцы и пазы становятся мельче, что уменьшает зубцовые гармоники (пульсации). Улучшается и отдача тепла от обмотки к активной стали. С другой стороны, поскольку каждую катушку в пазу приходится изолировать, большое число пазов влечет за собой потерю места в пазах на изоляцию и соответственное уменьшение мощности, особенно в машинах с высоким напряжением. Эти соображения определяют выбор числа пазов. Свойства обмотки и ее схема в значительной степени зависят от числа пазов на полюс и фазу — q. Число пар полюсов в генераторе
Синхронная машина состоит из двух основных частей: неподвижной — статора и вращающейся — ротора, и имеет две основные обмотки. Одна обмотка подключается к источнику постоянного тока. Протекающий по этой обмотке ток создает основное магнитное поле машины. Эта обмотка располагается на полюсах и называется обмоткой возбуждения. Иногда у машин небольшой мощности обмотка возбуждения отсутствует, а магнитное поле создается постоянными магнитами. Другая обмотка является обмоткой якоря. В ней индуктируется основная ЭДС машины. Она укладывается в пазы якоря и состоит из одной, двух или трех обмоток фаз. Наибольшее распространение в синхронных машинах нашли трехфазные обмотки якоря. В синхронных машинах чаще всего находит применение конструкция, при которой, обмотка якоря располагается на статоре, а обмотка возбуждения — на роторе (рис. 1). Синхронные машины небольшой мощности иногда имеют обращенное исполнение, когда обмотка якоря располагается на роторе, а обмотка возбуждения — на полюсах статора (рис. 2). В электромагнитном отношении обе конструкции равноценны.
Рассмотрим принцип действия синхронного генератора. Если через обмотку возбуждения протекает постоянный ток, то он создает постоянное во времени магнитное поле с чередующейся полярностью. При вращении полюсов и, следовательно, магнитного поля относительно проводников обмотки якоря в них индуктируются переменные ЭДС, которые, суммируясь, определяют результирующие ЭДС фаз. Если на якоре уложены три одинаковые обмотки, магнитные оси которых сдвинуты в пространстве на электрический угол, равный 120°, то в этих обмотках индуктируются ЭДС, образующие трехфазную систему. Частота индуктируемых в обмотках ЭДС зависит от числа пар полюсов р и частоты вращения ротора п: f1 = pn/60.
Поток ротора
xH и RH — индуктивное и активное сопротивление цепи нагрузки генератора. Чтобы определить положение вектора диаграмма синхронного двигателя
Будем считать, что возбуждение машины при переходе от генераторного режима к двигательному осталось неизменным, и поэтому сохраним в диаграмме двигателя, как и в диаграмме генератора, ту же длину вектора Режим двигателя устойчив при изменении θ в пределах от 0 до -90 и неустойчив при θ 1 / 4 1 2 3 4 > Следующая > >> Тут вы можете оставить комментарий к выбранному абзацу или сообщить об ошибке. Генератор поможет составить, скачать и распечатать примеры и уравнения по математике для тренировки устного
Блог пользователя mehanik770 на DRIVE2. 1. Для того чтоб не было просадки напряжения 2.
Если вы выбираете генератор для дома или дачи, обратите внимание на его обмотку. Медная
Фото, подробные технические характеристики, комплектация Г3-118. Доставка по всей России. Цены от производителя.
Отзыв владельца KIA Ceed (2G) — своими руками. С наступлением холодов, многие столкнулись с
Холодильники Toshiba купить дешево с бесплатной доставкой в Москве. Интернет-магазин по продаже недорогих холодильников
|






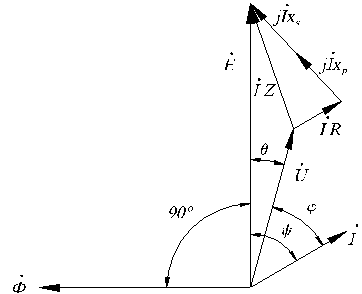 Векторная диаграмма синхронной машины в режиме генератора
Векторная диаграмма синхронной машины в режиме генератора
 направим влево по оси абсцисс (рис. 3.4). Вектор ЭДС
направим влево по оси абсцисс (рис. 3.4). Вектор ЭДС , индуктируемой потоком ротора
, индуктируемой потоком ротора
 , отстает от него на 90 градусов. Вектор тока статора
, отстает от него на 90 градусов. Вектор тока статора отстает от вектора
отстает от вектора на угол ψ, определяемый выражением:
на угол ψ, определяемый выражением: ,
, , опустим из конца вектора
, опустим из конца вектора перпендикуляр на направление вектора
перпендикуляр на направление вектора . На этом перпендикуляре, чтобы вычесть из
. На этом перпендикуляре, чтобы вычесть из реактивное напряжение
реактивное напряжение , отложим это реактивное напряжение вниз. Затем влево из полученной точки, параллельно вектору
, отложим это реактивное напряжение вниз. Затем влево из полученной точки, параллельно вектору отложим активное напряжение
отложим активное напряжение . Соединив полученную точку с началом координат, мы найдем вектор напряжения
. Соединив полученную точку с началом координат, мы найдем вектор напряжения . Соединив ту же точку с концом вектора
. Соединив ту же точку с концом вектора , получим треугольник внутренних падений напряжения генератора с гипотену
, получим треугольник внутренних падений напряжения генератора с гипотену
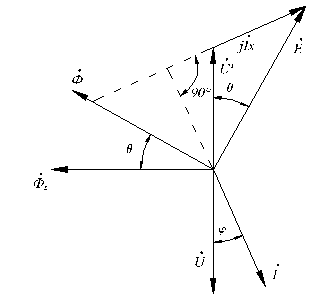
 , но отложим теперь
, но отложим теперь отстающим от
отстающим от на угол θ. Направление вектора
на угол θ. Направление вектора определяется условием
определяется условием . Чтобы определить направление вектора
. Чтобы определить направление вектора продолжим
продолжим (полученное вычитанием из вектора
(полученное вычитанием из вектора вектора
вектора ) и на эту прямую опустим перпендикуляр из начала координат и отложим на нем
) и на эту прямую опустим перпендикуляр из начала координат и отложим на нем . Теперь
. Теперь отстает от
отстает от более чем на 90 градусов. Положительную мощность ток
более чем на 90 градусов. Положительную мощность ток создает не с
создает не с , а с напряжением сети
, а с напряжением сети . Векторы потоков
. Векторы потоков и
и строим каждый под углом 90 градусов к вектору индуктируемой ими ЭДС (т е. к
строим каждый под углом 90 градусов к вектору индуктируемой ими ЭДС (т е. к и
и ).
).