Угловая скорость ротора генератора
СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ ЭНЕРГОСИСТЕМ
УРАВНЕНИЕ ДВИЖЕНИЯ РОТОРА ГЕНЕРАТОРА
Изучение электромеханических переходных процессов целесообразно начать с одного из основных уравнений, уравнения движения ротора генератора.
Движение вращающейся части энергоа1регата, далее условно называемой ротором генератора, описывается, согласно второму закону Ньютона, уравнениями:

где ,У0, а — момент инерции и угловое ускорение вращающейся части энергоагрегата (ротора турбины, вала и ротора генератора) соответственно; AM — небаланс моментов, действующих на вал; МТ — вращающий момент, создаваемый турбиной; Мс — момент сопротивления, обусловленный трением в подшипниках и сопротивлением охлаждающей среды; Мш — электромагнитный момент, обусловленный электрической нагрузкой генератора и отражающий взаимодействие между элекгромагнигными системами статора и ротора.
Момент Мс, составляющий около 3 % от номинального момента, в целях упрощения часто не учитывают, то есть принимают, что

С учетом того, что a = dca/dt, где со — угловая скорость, запишем уравнение движения ротора как

Выразим все составляющие этого уравнения в системе относительных единиц. Для этого разделим правую и левую его части на номинальный момент Мном = 5Н0М / со0 и представим результат в следующем виде [3]:

При дальнейших преобразованиях из (1.4) следует:


где со0 — синхронная частота, // — -постоянная инерции ротора
(вращающейся части агрегата), имеющая размерность времени и численно равная промежутку времени, в течение которого ротор разгоняется из состояния покоя до номинальной скорости вращения под действием номинального вращающего момента.
Введем базисную единицу времени /баз и после несложных преобразований из (1.7) получим:

Составляющие в последнем уравнении выражены в системе относительных единиц. За базисную единицу времени при расчетах переходных процессов обычно принимают промежуток времени в один радиан, то есть

Радиан — это промежуток времени, в течение которого достигается изменение угла в один радиан при синхронной угловой скорости [3].
При расчетах электромеханических переходных процессов в электроэнергетических системах вместо небаланса моментов АМ для упрощения используется, как правило, небаланс АР между мощностью турбины РТ и электрической (электромагнитной) мощностью Р генератора:

Связь между этими небалансами в системе относительных единиц выражается соотношением

где Лео* = со» -1 — переменная составляющая угловой скорости, обусловленная качаниями ротора генератора в динамических переходах энергосистемы.
Составляющей Aw*, как правило, пренебрегают из-за ее малой величины (Aw* =0,01. 0,02), а уравнение (1.9) записывается без явных признаков принадлежности к системе относительных единиц (без звездочек) в виде

Параметры движения ротора генератора, а именно его угловое ускорение а, угловая скорость w и угол 0 связаны между собой через производные:

где угол 0 отсчитывается от неподвижной оси, которую совмещают, как правило, с магнитной осью статорной обмотки фазы А (рис. 1.1).
Более удобной для отсчета углов является специально вводимая синхронно вращающаяся (синхронная) ось, относительно которой фиксируется угловое положение б ротора генератора.

Рис. 1.1. Параметры движения ротора генератора Связь между углами 0 и 5 определяется функцией

где w0/ отражает изменение угла синхронно вращающейся оси.
Двойное дифференцирование функции (1.15) приводит к равенству  или, согласно (1.14), к равенству
или, согласно (1.14), к равенству

При подстановке правых частей выражений (1.11) и (1.17) в уравнение движения ротора генератора (1.13) это уравнение принимает окончательную (основную) форму

где все составляющие представлены в системе относительных единиц: ТI [рад]; t [рад]; 6 [рад]; Рт [отн. ед.]; Рш [отн. ед.].
В практических расчетах это уравнение используется и в других формах (табл. 1.1), различающихся тем, что некоторые или все его составляющие выражены в именованных единицах [2].
Формы уравнения движения ротора генератора
Уравнение движения ротора генератора
В процессе эксплуатации СЭС балансы мощности турбин и генераторов, электроприводов и нагрузок периодически нарушаются. Это происходит из-за несовпадения реального графика нагрузки с планируемым. С учетом принятых допущений уравнение баланса мощности для отдельного агрегата турбина-генератор в относительных единицах можно записать в виде
 , (2.5)
, (2.5)
где РТ– мощность турбины, определяющая исходный установившийся режим системы (РО = РТ = РЭЛ);
РЭЛ – электромагнитная мощность генератора;
РПОТ – механические потери в агрегате;
 — избыточный момент на валу генератора;
— избыточный момент на валу генератора;
 — потери в демпферных обмотках при нарушении;
— потери в демпферных обмотках при нарушении;
Рd – демпферный коэффициент;
 — , угол, определяющий пространственное положение продольной оси ротора;
— , угол, определяющий пространственное положение продольной оси ротора;
ТJ– постоянная инерции вращающихся масс турбины и генератора.
ТJ— время, в течение которого скорость ротора изменяется от нуля до номинальной под действием номинального избыточного момента и при постоянном моменте сопротивления. Она определяется следующим образом:
 (2.6)
(2.6)
где GD 2 — маховой момент, т·м 2 ,
G – масса подвижных элементов;
D – диаметр подвижных масс;
п – скорость вращения, об/мин;
SНОМ – номинальная мощность генератора, кВ·А.
Выражение (2.5) называется уравнением электромеханических переходных процессов. Если потерями мощности в агрегате и потерями в демпферных контурах пренебречь, то это уравнение примет вид
 , (2.7)
, (2.7)
где ω — угловая скорость;
α — угловое ускорение вращающихся масс.
При РТ – РЭЛ РТ) имеет место тормозящий момент на валу агрегата, а при РТ–РЭЛ>0 (РТ > РЭЛ) — ускоряющий момент.
Торможение или ускорения роторов генераторов являются следствием набросов и сбросов нагрузки. Возникающий при этом небаланс мощности покрывается за счет энергии вращающихся масс.
Мощность, развиваемая турбиной, зависит от массы пропускаемого через нее пара или воды в единицу времени и может изменяться с помощью первичных регуляторов.
Незначительное возмущение в цепи статора генератора вызывает движение ротора в сторону увеличения или уменьшения угла δ (это зависит от знака избыточного момента). Возмущение сообщает ротору некоторое ускорение α, которое в относительных единицах пропорционально избыточному моменту ΔМ и обратно пропорционально постоянной инерции Тj:
 . (2.8)
. (2.8)
Здесь принимается, что при небольших изменениях скорости ΔM*=ΔР*;
Возвращаясь к уравнению (2.6) и учитывая, что ускорение представляет собой не что иное, как вторую производную от угла по времени
 , (2.9)
, (2.9)
 , (2.10)
, (2.10)
где Р0 — мощность турбины;
Ртах — максимальное значение мощности аварийного режима.
Уравнение (2.5) также называется уравнением движения ротора генератора. Его решение в форме δ = f(t) дает картину изменения угла δ во времени и позволяет судить об устойчивости генератора.
Глава 3. ДИНАМИЧЕСКАЯ УСТОЙЧИВОСТЬ
Если статическая устойчивость характеризует установившийся режим системы, то при анализе динамической устойчивости выявляется способность системы сохранять синхронный режим работы при больших его возмущениях. Большие возмущения возникают при различных коротких замыканиях, отключении линии электропередачи, генераторов, трансформаторов и т.д. К большим возмущениям относятся также изменения мощности крупной нагрузки, потеря возбуждения какого-либо генератора, включение крупных двигателей. Одним из следствий возникшего возмущения является отклонение скоростей вращения роторов генераторов от синхронной (качания роторов генераторов системы).
Если после какого-либо возмущения взаимные углы роторов примут определенные значения (их колебания затухнут около каких-либо новых значений), то считается, что динамическая устойчивость сохраняется. Если хотя бы у одного генератора ротор начинает проворачиваться относительно поля статора, то это признак нарушения динамической устойчивости. В общем случае о динамической устойчивости системы можно судить по зависимостям δ = f(t),полученным в результате совместного решения уравнений движения роторов генераторов. Но существует более простой и наглядный метод оценки динамической устойчивости, основанный на энергетическом подходе к анализу динамической устойчивости, который называется графическим методом или методом площадей.
Нам важно ваше мнение! Был ли полезен опубликованный материал? Да | Нет
Электронная библиотека
Вращение ротора с размещенной на нем обмоткой возбуждения, создающей магнитное поле чередующейся полярности (см. рис. 2.1), приводит к возникновению ЭДС в проводниках обмотки статора, который нередко называется якорем. Индуктируемая ЭДС равна произведению скорости магнитного поля возбуждения на его интенсивность. Интенсивность поля возбуждения определяется током обмотки возбуждения и числом ее витков.
При присоединении генератора к нагрузке, т.е. к потребителю электрической энергии или к электрической сети, ЭДС обмотки статора создает в ней ток. Обмотка статора — трехфазная, поэтому протекающие по ней токи — тоже трехфазные. Они создают магнитное поле, вращающееся со скоростью ротора. Магнитное поле обмотки статора вращается с той же частотой вращения, что и ротор. Таким образом, в синхронном генераторе оба магнитных поля (обмотки ротора, созданное постоянным током возбуждения, и обмотки статора, созданное переменными токами трехфазной обмотки) оказываются взаимно неподвижными, вращающимися синхронно. Следует заметить, что взаимная неподвижность магнитных полей обмоток статора и ротора характерна практически для всех традиционных видов электрических машин.
 Взаимодействие магнитных полей ротора и статора создает электромагнитный момент, направленный в генераторном режиме электрической машины навстречу механическому моменту, созданному паровой, газовой или гидравлической турбиной. В случае равенства этих двух моментов ротор генератора будет вращаться с постоянной скоростью, обеспечивая индуктирование стабильной частоты ЭДС обмотки статора, совпадающей с частотой напряжения сети. Это нормальный синхронный режим работы генератора, когда частота вращения (угловая скорость) ротора определяется частотой напряжения сети.
Взаимодействие магнитных полей ротора и статора создает электромагнитный момент, направленный в генераторном режиме электрической машины навстречу механическому моменту, созданному паровой, газовой или гидравлической турбиной. В случае равенства этих двух моментов ротор генератора будет вращаться с постоянной скоростью, обеспечивая индуктирование стабильной частоты ЭДС обмотки статора, совпадающей с частотой напряжения сети. Это нормальный синхронный режим работы генератора, когда частота вращения (угловая скорость) ротора определяется частотой напряжения сети.

Задачей персонала является регулирование подачи на турбину, создающую механический момент, требуемого количества агента (пара, газа, воды) необходимых параметров для обеспечения равновесия вращающего и тормозящего электромагнитного моментов (рис. 2.6).
При аварийном отключении генератора от нагрузки токи статора становятся равными нулю. Электромагнитный тормозящий момент также исчезает, а из-за сохраняющегося вращающего механического момента ротор начинает разгоняться сверх номинальной скорости до тех пор, пока не будет прекращена подача агента (т.е. пара, газа, воды и т.п.) на турбину. Очевидно, что наиболее быстро это можно осуществить для паровой или газовой турбин. Частота вращения при этом успевает возрасти на 10—20%. Гораздо сложнее остановить поток воды. В зависимости от типа применяемого гидравлического колеса частота вращения может возрасти в процессе прекращения подачи воды в 1,8—3,5 раза по сравнению с номинальной. Эта предельно возможная частота вращения ротора при наиболее неблагоприятном отказе системы регулирования подачи воды в турбину носит название угонной частоты вращения, или угонной скорости.
Механическая прочность ротора генератора рассчитывается так, чтобы при угонной частоте вращения механические напряжения в элементах ротора из-за действующих центробежных сил, пропорциональных квадрату частоты вращения, не превосходили пределов текучести материалов ротора. Деформация обода ротора не должна превышать размера воздушного зазора. После того, как гидрогенератор вращался с угонной частотой вращения, его следует остановить для тщательного осмотра, контроля всех креплений, а в случае необходимости и для ремонта. В соответствии с государственными стандартами все гидрогенераторы должны в течение 2мин выдерживать без остаточных деформаций повышенную частоту вращения, равную 1,75 номинальной. В этих случаях останавливать их для осмотра необязательно.
Срочно?
Закажи у профессионала, через форму заявки
8 (800) 100-77-13 с 7.00 до 22.00
Уравнение движения ротора генератора. Абсолютное и относительное движение ротора. Физический смысл входящих в него величин




![]()
![]()
В процессе работы генератора к его ротору приложены два момента: вращающий момент турбины МТ и электромагнитный момент М, пропорциональный отдаваемой генератором активной мощности Р и являющийся моментом сопротивления для турбины
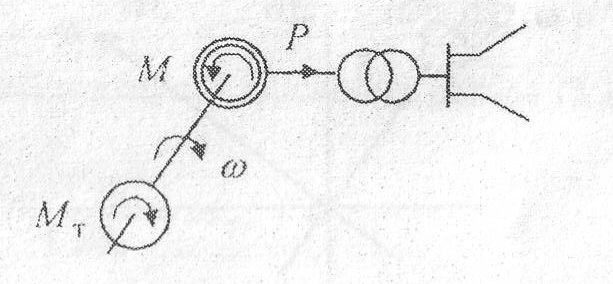
При несоответствии этих моментов скорость ротора генератора изменяется в соответствии со вторым законом Ньютона  (1)
(1)
где J — осевой момент инерции вращающихся масс роторов генератора и турбины, кг-м 2 ;
Q — скорость вращения роторов в механическом движении, рад*с -1 ;
МТ, М — моменты, действующие на ротор генератора, Н-м.
Уравнение абсолютного движения ротора (1) в относительных единицах примет вид:  . Здесь
. Здесь  .
. 
 — постоянная инерции, равна времени разгона tразг ротора отключенного от сети генератора от состояния покоя до номинальной скорости вращения при приложении номинального момента турбины.
— постоянная инерции, равна времени разгона tразг ротора отключенного от сети генератора от состояния покоя до номинальной скорости вращения при приложении номинального момента турбины.
 , c
, c
n – скорость ротора
Sб – базисная мощность
GD 2 – маховый момент
Уравнение относительного движения ротора  .
.
19. Наиболее точным описанием переходных процессов в синхронном двигателе являются уравнения Парка-Горева. Учитывая, что двигатель в отличие от генератора потребляет электрическую энергию и момент, развиваемый двигателем, является вращающим моментом.

Уравнение движения ротора двигателя 
В общем случае момент сопротивления механизма, присоединенного к ротору двигателя Ммех, зависит от скорости вращения. Часто полагают

где Мст -момент сопротивления механизма при скорости ϖ=0 (статический момент);
MQ -момент сопротивления механизма при номинальной скорости вращения ϖ0
а — коэффициент, обычно равный 0-2.
Полные уравнения Парка-Горева для описания переходных процессов в синхронных двигателях при исследований устойчивости электрических систем применяются редко. Обычно используются упрощенные уравнения. Упрощение уравнений Парка-Горева для синхронного двигателя осуществляется точно так же, как и для синхронного генератора. При этом, как и для синхронного генератора, для синхронного двигателя имеется несколько математических моделей, характеризующихся различной степенью точности описания переходных процессов.
20. Что собою обозначают (как введены) величины: Eq, E’q,E”q,E”d,E”
 -ЭДС возбуждения пропорционально полному току ротора
-ЭДС возбуждения пропорционально полному току ротора
 -переходная ЭДС по оси q-пропорционально результирующему потокосцеплению обмотки возбуждения
-переходная ЭДС по оси q-пропорционально результирующему потокосцеплению обмотки возбуждения 
 для явнополюсных генераторов
для явнополюсных генераторов
 для неявнополюсных генераторов
для неявнополюсных генераторов
Частота вращения: формула
Количество повторений каких-либо событий или их возникновения за одну единицу таймера называется частотой. Это физическая величина измеряется в герцах – Гц (Hz). Она обозначается буквами ν, f, F, и есть отношение количества повторяющихся событий к промежутку времени, в течение которого они произошли.
При обращении предмета вокруг своего центра можно говорить о такой физической величине, как частота вращения, формула:
где:
- N – количество оборотов вокруг оси или по окружности,
- t – время, за которое они были совершены.
В системе СИ обозначается как – с-1 (s-1) и именуется как обороты в секунду (об/с). Применяют и другие единицы вращения. При описании вращения планет вокруг Солнца говорят об оборотах в часах. Юпитер делает одно вращение в 9,92 часа, тогда как Земля и Луна оборачиваются за 24 часа.
Номинальная скорость вращения
Прежде, чем дать определение этому понятию, необходимо определиться, что такое номинальный режим работы какого-либо устройства. Это такой порядок работы устройства, при котором достигаются наибольшая эффективность и надёжность процесса на продолжении длительного времени. Исходя из этого, номинальная скорость вращения – количество оборотов в минуту при работе в номинальном режиме. Время, необходимое для одного оборота, составляет 1/v секунд. Оно называется периодом вращения T. Значит, связь между периодом обращения и частотой имеет вид:
К сведению. Частота вращения вала асинхронного двигателя – 3000 об./мин., это номинальная скорость вращения выходного хвостовика вала при номинальном режиме работы электродвигателя.
Как найти или узнать частоты вращений различных механизмов? Для этого применяется прибор, который называется тахометр.

Угловая скорость
Когда тело движется по окружности, то не все его точки движутся с одинаковой скоростью относительно оси вращения. Если взять лопасти обычного бытового вентилятора, которые вращаются вокруг вала, то точка расположенная ближе к валу имеет скорость вращения больше, чем отмеченная точка на краю лопасти. Это значит, у них разная линейная скорость вращения. В то же время угловая скорость у всех точек одинаковая.
Угловая скорость представляет собой изменение угла в единицу времени, а не расстояния. Обозначается буквой греческого алфавита – ω и имеет единицу измерения радиан в секунду (рад/с). Иными словами, угловая скорость – это вектор, привязанный к оси обращения предмета.
Формула для вычисления отношения между углом поворота и временным интервалом выглядит так:
где:
- ω – угловая скорость (рад./с);
- ∆ϕ – изменение угла отклонения при повороте (рад.);
- ∆t – время, затраченное на отклонение (с).
Обозначение угловой скорости употребляется при изучении законов вращения. Оно употребляется при описании движения всех вращающихся тел.
Угловая скорость в конкретных случаях
На практике редко работают с величинами угловой скорости. Она нужна при конструкторских разработках вращающихся механизмов: редукторов, коробок передач и прочего.
Вычислить её, применяя формулу, можно. Для этого используют связь угловой скорости и частоты вращения.
где:
- π – число, равное 3,14;
- ν – частота вращения, (об./мин.).
В качестве примера могут быть рассмотрены угловая скорость и частота вращения колёсного диска при движении мотоблока. Часто необходимо уменьшить или увеличить скорость механизма. Для этого применяют устройство в виде редуктора, при помощи которого понижают скорость вращения колёс. При максимальной скорости движения 10 км/ч колесо делает около 60 об./мин. После перевода минут в секунды это значение равно 1 об./с. После подстановки данных в формулу получится результат:
ω = 2*π*ν = 2*3,14*1 = 6,28 рад./с.
К сведению. Снижение угловой скорости часто требуется для того, чтобы увеличить крутящий момент или тяговое усилие механизмов.

Как определить угловую скорость
Принцип определения угловой скорости зависит от того, как происходит движение по окружности. Если равномерно, то употребляется формула:
Если нет, то придётся высчитывать значения мгновенной или средней угловой скорости.
Величина, о которой идёт разговор, векторная, и при определении её направления используют правило Максвелла. В просторечии – правило буравчика. Вектор скорости имеет одинаковое направление с поступательным перемещением винта, имеющего правую резьбу.

Рассмотрим на примере, как определить угловую скорость, зная, что угол поворота диска радиусом 0,5 м меняется по закону ϕ = 6*t:
ω = ϕ / t = 6 * t / t = 6 с-1
Вектор ω меняется из-за поворота в пространстве оси вращения и при изменении значения модуля угловой скорости.
Угол поворота и период обращения
Рассмотрим точку А на предмете, вращающимся вокруг своей оси. При обращении за какой-то период времени она изменит своё положение на линии окружности на определённый угол. Это угол поворота. Он измеряется в радианах, потому что за единицу берётся отрезок окружности, равный радиусу. Ещё одна величина измерения угла поворота – градус.
Когда в результате поворота точка А вернётся на своё прежнее место, значит, она совершила полный оборот. Если её движение повторится n-раз, то говорят о некотором количестве оборотов. Исходя из этого, можно рассматривать 1/2, 1/4 оборота и так далее. Яркий практический пример этому – путь, который проделывает фреза при фрезеровании детали, закреплённой в центре шпинделя станка.
Внимание! Угол поворота имеет направление. Оно отрицательное, когда вращение происходит по часовой стрелке и положительное при вращении против движения стрелки.
Если тело равномерно продвигается по окружности, можно говорить о постоянной угловой скорости при перемещении, ω = const.
В этом случае находят применения такие характеристики, как:
- период обращения – T, это время, необходимое для полного оборота точки при круговом движении;
- частота обращения – ν, это полное количество оборотов, которое совершает точка по круговой траектории за единичный временной интервал.
Интересно. По известным данным, Юпитер обращается вокруг Солнца за 12 лет. Когда Земля за это время делает вокруг Солнца почти 12 оборотов. Точное значение периода обращения круглого гиганта – 11,86 земных лет.
Циклическая частота вращения (обращения)
Скалярная величина, измеряющая частоту вращательного движения, называется циклической частотой вращения. Это угловая частота, равная не самому вектору угловой скорости, а его модулю. Ещё её именуют радиальной или круговой частотой.
Циклическая частота вращения – это количество оборотов тела за 2*π секунды.
У электрических двигателей переменного тока это частота асинхронная. У них частота вращения ротора отстаёт от частоты вращения магнитного поля статора. Величина, определяющая это отставание, носит название скольжения – S. В процессе скольжения вал вращается, потому что в роторе возникает электроток. Скольжение допустимо до определённой величины, превышение которой приводит к перегреву асинхронной машины, и её обмотки могут сгореть.
Устройство этого типа двигателей отличается от устройства машин постоянного тока, где токопроводящая рамка вращается в поле постоянных магнитов. Большое количество рамок вместил в себя якорь, множество электромагнитов составили основу статора. В трёхфазных машинах переменного тока всё наоборот.
При работе асинхронного двигателя статор имеет вращающееся магнитное поле. Оно всегда зависит от параметров:
- частоты питающей сети;
- количества пар полюсов.
Скорость вращения ротора состоит в прямом соотношении со скоростью магнитного поля статора. Поле создаётся тремя обмотками, которые расположены под углом 120 градусов относительно друг друга.
Переход от угловой к линейной скорости
Существует различие между линейной скоростью точки и угловой скоростью. При сравнении величин в выражениях, описывающих правила вращения, можно увидеть общее между этими двумя понятиями. Любая точка В, принадлежащая окружности с радиусом R, совершает путь, равный 2*π*R. При этом она делает один оборот. Учитывая, что время, необходимое для этого, есть период Т, модульное значение линейной скорости точки В находится следующим действием:
ν = 2*π*R / Т = 2*π*R* ν.
Так как ω = 2*π*ν, то получается:
Следовательно, линейная скорость точки В тем больше, чем дальше от центра вращения находится точка.
К сведению. Если рассматривать в качестве такой точки города на широте Санкт-Петербурга, их линейная скорость относительно земной оси равна 233 м/с. Для объектов на экваторе – 465 м/с.
Числовое значение вектора ускорения точки В, движущейся равномерно, выражается через R и угловую скорость, таким образом:
а = ν2/ R, подставляя сюда ν = ω* R, получим: а = ν2/ R = ω2* R.
Это значит, чем больше радиус окружности, по которой движется точка В, тем больше значение её ускорения по модулю. Чем дальше расположена точка твердого тела от оси вращения, тем большее ускорение она имеет.
Поэтому можно вычислять ускорения, модули скоростей необходимых точек тел и их положений в любой момент времени.

Понимание и умение пользоваться расчётами и не путаться в определениях помогут на практике вычислениям линейной и угловой скоростей, а также свободно переходить при расчётах от одной величины к другой.
Видео
2.2. Уравнение движения ротора генератора
В процессе эксплуатации СЭС балансы мощности турбин и генераторов, электроприводов и нагрузок периодически нарушаются. Это происходит из-за несовпадения реального графика нагрузки с планируемым. С учетом принятых допущений уравнение баланса мощности для отдельного агрегата турбина-генератор в относительных единицах можно записать в виде
 , (2.5)
, (2.5)
где РТ – мощность турбины, определяющая исходный установившийся режим системы (РО = РТ = РЭЛ);
РЭЛ – электромагнитная мощность генератора;
РПОТ – механические потери в агрегате;
 — избыточный момент на валу генератора;
— избыточный момент на валу генератора;
 — потери в демпферных обмотках при нарушении;
— потери в демпферных обмотках при нарушении;
Рd – демпферный коэффициент;
 — , угол, определяющий пространственное положение продольной оси ротора;
— , угол, определяющий пространственное положение продольной оси ротора;
ТJ – постоянная инерции вращающихся масс турбины и генератора.
ТJ — время, в течение которого скорость ротора изменяется от нуля до номинальной под действием номинального избыточного момента и при постоянном моменте сопротивления. Она определяется следующим образом:
 (2.6)
(2.6)
где GD 2 — маховой момент, т·м 2 ,
G – масса подвижных элементов;
D – диаметр подвижных масс;
п – скорость вращения, об/мин;
SНОМ – номинальная мощность генератора, кВ·А.
Выражение (2.5) называется уравнением электромеханических переходных процессов. Если потерями мощности в агрегате и потерями в демпферных контурах пренебречь, то это уравнение примет вид
 , (2.7)
, (2.7)
где ω — угловая скорость;
α — угловое ускорение вращающихся масс.
При РТ – РЭЛ РТ) имеет место тормозящий момент на валу агрегата, а при РТ–РЭЛ>0 (РТ > РЭЛ) — ускоряющий момент.
Торможение или ускорения роторов генераторов являются следствием набросов и сбросов нагрузки. Возникающий при этом небаланс мощности покрывается за счет энергии вращающихся масс.
Мощность, развиваемая турбиной, зависит от массы пропускаемого через нее пара или воды в единицу времени и может изменяться с помощью первичных регуляторов.
Незначительное возмущение в цепи статора генератора вызывает движение ротора в сторону увеличения или уменьшения угла δ (это зависит от знака избыточного момента). Возмущение сообщает ротору некоторое ускорение α, которое в относительных единицах пропорционально избыточному моменту ΔМ и обратно пропорционально постоянной инерции Тj:
 . (2.8)
. (2.8)
Здесь принимается, что при небольших изменениях скорости ΔM*=ΔР*;
Возвращаясь к уравнению (2.6) и учитывая, что ускорение представляет собой не что иное, как вторую производную от угла по времени
 , (2.9)
, (2.9)
 , (2.10)
, (2.10)
где Р0 — мощность турбины;
Ртах — максимальное значение мощности аварийного режима.
Уравнение (2.5) также называется уравнением движения ротора генератора. Его решение в форме δ = f(t) дает картину изменения угла δ во времени и позволяет судить об устойчивости генератора.
Глава 3. Динамическая устойчивость
Если статическая устойчивость характеризует установившийся режим системы, то при анализе динамической устойчивости выявляется способность системы сохранять синхронный режим работы при больших его возмущениях. Большие возмущения возникают при различных коротких замыканиях, отключении линии электропередачи, генераторов, трансформаторов и т.д. К большим возмущениям относятся также изменения мощности крупной нагрузки, потеря возбуждения какого-либо генератора, включение крупных двигателей. Одним из следствий возникшего возмущения является отклонение скоростей вращения роторов генераторов от синхронной (качания роторов генераторов системы).
Если после какого-либо возмущения взаимные углы роторов примут определенные значения (их колебания затухнут около каких-либо новых значений), то считается, что динамическая устойчивость сохраняется. Если хотя бы у одного генератора ротор начинает проворачиваться относительно поля статора, то это признак нарушения динамической устойчивости. В общем случае о динамической устойчивости системы можно судить по зависимостям δ = f(t), полученным в результате совместного решения уравнений движения роторов генераторов. Но существует более простой и наглядный метод оценки динамической устойчивости, основанный на энергетическом подходе к анализу динамической устойчивости, который называется графическим методом или методом площадей.