Что такое тормозной момент генератора
Что такое тормозной момент генератора
Электромагнитный момент синхронной машины:
Эта зависимость носит название угловой характеристики синхронной машины (рис. 3.6).
Рис. 3.6. Угловая характеристика синхронной машины
Если θ>0, то мощность и момент положительны, машина работает в режиме генератора и отдает электрическую мощность, а электромагнитный момент при этом является тормозящим моментом, который преодолевает первичный двигатель. Работа, совершаемая первичным двигателем, преобразуется в электрическую работу, отдаваемую генератором в сеть. При увеличении создаваемого первичным двигателем вращающего момента, ротор машины, вследствие сообщаемого ему ускорения, увеличивает угол θ и после нескольких колебаний около синхронной скорости восстанавливается равновесие вращающегося момента первичного двигателя и тормозящего электромагнитного момента генератора. Таким же образом восстанавливается это равновесие при уменьшении вращающего момента первичного двигателя посредством уменьшения угла θ и вызываемого этим снижения тормозящего электромагнитного момента.
Работа синхронного генератора устойчива при изменении угла θ в пределах от 0 до 90 градусов.
Кривая М э.м. =F(θ) за точкой θ=90 соответствует области неустойчивой работы синхронного генератора. В этих условиях вращающий момент первичного двигателя превышает максимальный тормозящий момент генератора, т. к. увеличение θ свыше 90 приводит к уменьшению тормозящего электромагнитного момента М э.м. Избыток вращающего момента создает дальнейшее ускорение ротора, что обуславливает дальнейшее возрастание θ и новое уменьшение тормозящего момента и т. д. пока генератор не выпадет из синхронизма. В таком случае нарушается автоматическая связь между частотой сети и скоростью вращения ротора; ЭДС машины и напряжение сети перестают уравновешивать друг друга, и токи в обмотках статора могут достигнуть весьма больших значений токов короткого замыкания, т. к. мгновенные значения ЭДС статора и напряжение сети могут теперь складываться, а не вычитаться, как при нормальной работе. При выпадении генератора из синхронизма его отключают от сети приборы автоматической защиты.
Уменьшение вращающего момента первичного двигателя вызывает соответствующее уменьшение угла θ, и когда θ станет равным нулю, тогда первичный двигатель будет лишь покрывать потери синхронной машины; в этих условиях при θ=0 машина не будет отдавать энергию в сеть как генератор и потреблять ее из сети как двигатель. Этот режим является промежуточным между режимами генератора и двигателя.
Если приложить к валу синхронной машины тормозящий момент, то он вызовет некоторое замедление вращения ротора, вследствие чего угол θ станет отрицательным. Это значит, что ротор отстанет на угол θ/р от результирующего поля машины, и последнее станет ведущим, а ротор — ведомым. Перемена знака θ вызовет изменение знака электрической мощности Р и электромагнитного момента М э.м. ; машина переходит в режим двигателя; она потребляет энергию из сети, ее электромагнитный момент стал вращающим моментом, уравновешивающим механический тормозящий момент, приложенный к валу машины.
В этом случае для построения упрощенной векторной диаграммы синхронного двигателя удобно использовать векторы и (Рис. 3.1.7).
Рис. 3.1.7. Упрощенная векторная диаграмма синхронного двигателя
Будем считать, что возбуждение машины при переходе от генераторного режима к двигательному осталось неизменным, и поэтому сохраним в диаграмме двигателя, как и в диаграмме генератора, ту же длину вектора , но отложим теперь отстающим от на угол θ. Направление вектора определяется условием . Чтобы определить направление вектора продолжим (полученное вычитанием из вектора вектора ) и на эту прямую опустим перпендикуляр из начала координат и отложим на нем . Теперь отстает от более чем на 90 градусов. Положительную мощность ток создает не с , а с напряжением сети . Векторы потоков и строим каждый под углом 90 градусов к вектору индуктируемой ими ЭДС (т е. к и ).
Режим двигателя устойчив при изменении θ в пределах от 0 до -90 и неустойчив при θ э.м.max , то произойдет выпадение двигателя из синхронизма — ротор постепенно уменьшит скорость и, наконец, остановится, ЭДС в обмотке уменьшится до 0, а токи достигнут весьма больших значений, во много раз превышающих номинальные. Автоматическая защита отключит двигатель от питания сети.
Работающая параллельно с сетью синхронная машина нагружается как в режиме двигателя, так и в режиме генератора, путем изменения момента, приложенного к валу. Практически используется только кратковременный переход двигателя в режим генератора для быстрого торможения двигателя.
называется синхронизирующей мощностью, а величина
Практически синхронная машина работает сравнительно далеко от предела статической устойчивости, соответствующего θ=90 градусов. У синхронных генераторов угол θ при номинальной нагрузке не превышает 20 градусов, а у двигателей, как менее ответственной машины, этот угол достигает 30 градусов.
Форма угловой характеристики синхронной машины объясняется картиной взаимодействия потоков Ф в и Ф в синхронной машине (рис. 3.8).
Рис. 3.8. Картина взаимодействия потоков и в синхронной машине: (а) — при
При θ=0 (рис.3.8а) между ротором и статором существует только сила притяжения (между двумя магнитами). Тангенциальная составляющая силы равна 0, Поэтому электромагнитный момент равен 0 . При θ>0 (рис.3.8б) ось потока возбуждения опережает ось результирующего потока на угол θ, вследствие чего тангенциальная составляющая силы создает тормозной момент для внешнего двигателя, приводящего во вращение ротор синхронного генератора. Максимум тормозного момента соответствует θ=90 градусов, когда ось полюсов ротора расположена между осями полюсов статора. При θ
Подключение синхронной машины к сети. При подключении синхронного генератора применяют два способа: точная синхронизация и самосинхронизация.
Первый способ требует предварительную синхронизацию включаемого генератора, которая осуществляется следующим образом (рис. 3.9).
Рис. 3.9. Схема подключения синхронного генератора к сети с помощью лампового синхроноскопа
Скорость машины Г доводится примерно до синхронного числа оборотов и ее возбуждение регулируется так, чтобы вольтметр на ее зажимах показал значение, равное напряжению сети. При этом последовательность фаз машины должна соответствовать последовательности фаз сети. Перед подключением машины к сети необходимо более точное регулирование частоты вращения машины и фазы ее ЭДС. Для этой цели используют синхроскопы. В простейшем случае синхроскоп составляется из ламп накаливания. Чем меньше частота генератора отличается от частоты сети, тем медленнее будут происходить колебания света фазных ламп. Достигают совпадения частот, при котором промежутки времени между следующими друг за другом вспышками ламп будут не менее 3. 5 сек. Затем в момент полного затухания ламп замыкается рубильник.
Сущность метода самосинхронизации состоит в том, что генератор включается на сеть без возбуждения, когда его скорость отличается от синхронной на 2. 3%. Обмотка ротора во время такого включения должна быть замкнута накоротко или на некоторое сопротивление. Сейчас же после включения генератора на сеть в ротор подается постоянный ток возбуждения, и генератор сам доходит до синхронной скорости под действием электромагнитных сил.
Вращающий момент синхронного двигателя при пуске равен 0, поэтому пуск двигателя состоит из двух этапов: первый этап — синхронный пуск с помощью короткозамкнутой обмотки, расположенной на роторе, и второй этап — втягивание в синхронизм после включения постоянного тока возбуждения. Во время первого этапа асинхронного пуска обмотка возбуждения отключается от источника постоянного тока и замыкается на активное сопротивление, превышающее активное сопротивление обмотки возбуждения в 10. 15 раз. Не следует оставлять обмотку возбуждения разомкнутой, т. к. вращающееся поле может индуктировать в ней весьма значительную ЭДС, опасную для изоляции. Но с другой стороны, нецелесообразно было бы замыкать эту обмотку накоротко, т. к. в ней возникает значительный однофазный ток, который будет тормозить ротор по достижении им половины синхронной скорости.
Режимы работы (двигательный, генераторный, торможение) двигателя постоянного тока ДПТ

В двигателях параллельного возбуждения при неизменном токе в обмотке возбуждения (IВ = const ) магнитный поток изменяется при нагрузке весьма незначительно, поэтому с некоторым приближением можно принять Ф = const . В этом случае электромагнитный момент [см. (25.24)] пропорционален току в цепи якоря и механическая характеристика n = f(M) может быть представлена зависимостью n = f(Ia) (рис. 29.8). Если эту характеристику продолжить в обе стороны за пределы осей координат (прямая 1), то можно показать, что электрическая машина в зависимости от величины и знака внешнего момента, действующего на ее вал со стороны связанного с ним механизма, может работать в трех режимах: двигательном, тормозном и генераторном.
При работе двигателя без нагрузки ток в цепи якоря Ia0 небольшой. При этом частота вращения n = n0 (точка А). Затем с появлением на валу двигателя нагрузочного момента, противодействующего вращающему, ток в цепи якоря возрастает, а частота вращения уменьшается. Если увеличить противодействующий момент до значения, при котором якорь двигателя остановится (точка В), то ЭДС Ea = 0 и ток двигателя достигает значения 
Если двигатель применяют для привода механизма, нагрузочный момент которого может быть больше вращающегося (например, привод барабана, на который наматывается трос с грузом), то при последующем увеличении нагрузочного момента этого механизма якорь машины вновь начнет вращаться, но теперь уже в другую сторону. Теперь момент, действующий на вал электрической машины со стороны нагрузочного механизма, будет вращающим, а электромагнитный момент машины — тормозящим, т. е. электрическая машина перейдет в тормозной режим. При работе машины в этом режиме ЭДС якоря действует согласованно с напряжением, т. е.
При использовании машины в тормозном режиме необходимо принять меры для ограничения тока якоря. С этой целью в цепь якоря включают добавочное сопротивление, величина которого обеспечивает получение искусственной характеристики двигателя, пересекающейся с осью абсцисс при токе якоря  (штриховая прямая).
(штриховая прямая).
Если при работе двигателя в режиме х.х. к его валу приложить момент, направленный в сторону вращения якоря, то частота вращения, а следовательно, и ЭДС Ea начнут возрастать. Когда ЭДС Ea = U , машина не будет потреблять тока из сети (точка С) и частота вращения якоря достигает значения, называемого пограничной частотой вращения nxx

Рис. 29.8. Режимы работы машины постоянного тока:
1 — с параллельным (независимым) возбуждением;
2 — со смешанным возбуждением;
3 — с последовательным возбуждением
При дальнейшем увеличении внешнего момента на валу машины ЭДС Ea станет больше напряжения, а в цепи якоря опять возникает ток, но другого направления. При этом машина перейдет в генераторный режим: механическая энергия, затрачиваемая на вращение якоря, будет преобразовываться в электрическую и поступать в сеть.
Перевод машины из двигательного в генераторный режим используют для торможения двигателя, так как в генераторном режиме электромагнитный момент является тормозящим (рекуперативное торможение).
Большая Энциклопедия Нефти и Газа
Тормозящий электромагнитный момент
Тормозящий электромагнитный момент растет по мере увеличения угла смещения ротора 0, поэтому новое положение устойчивой работы наступит при таком его значении, при котором действующий момент первичного двигателя и противодействующий электромагнитный момент генератора сравняются. [1]
Кроме тормозящего электромагнитного момента М, на валу генератора существует еще момент М0, называемый моментом холостого хода и соответствующий механическим потерям генератора и потерям в стали его якоря. [2]
С уменьшением тока возбуждения уменьшается тормозящий электромагнитный момент генератора [ выражения ( 1 — 34) и ( 1 — 35) ], при некотором значении тока возбуждения этот момент оказывается меньше вращающего момента турбины, и генератор выпадает из синхронизма. За счет избыточного вращающего момента ротор ускоряется. [4]
Появившийся небаланс между ускоряющим моментом турбины АЛ1 и тормозящим электромагнитным моментом генератора ( ДМ Мт — М) приводит к тому, что генерг-тор начинает изменять свою скорость. [5]
Появившийся небаланс между ускоряющим моментом турбины ДМ0 и тормозящим электромагнитным моментом генератора ( ДМ0 Мт — — Ми) приводит к тому, что генератор начинает изменять скорость. [6]
С уменьшением тока возбуждения уменьшается, как это видно из выражений (20.12) и (20.14), тормозящий электромагнитный момент генератора ; при некотором значении тока возбуждения этот момент оказывается меньше вращающего момента турбины и генератор выпадает из синхронизма. За счет избыточного вращающего момента ротор ускоряется. Магнитное поле статора, вращающееся в пространстве с синхронной частотой вращения, пересекает ротор и наводит в теле ротора, в демпферных обмотках и в обмотке возбуждения ( если она замкнута) токи с частотой скольжения. Эти токи создают тормозящий асинхронный момент, и генератор начинает выдавать активную мощность в сеть. [8]
С уменьшением тока возбуждения уменьшается, как это видно из ( 19 — 12) и ( 19 — 14), тормозящий электромагнитный момент генератора ; при некотором значении тока возбуждения этот момент оказывается меньше вращающего момента турбины и генератор выпадает из синхронизма. За счет избыточного вращающего момента ротор ускоряется. Магнитное поле статора, вращающееся в пространстве с синхронной частотой вращения, пересекает ротор и наводит в теле ротора, в демпферных обмотках и в обмотке возбуждения ( если она замкнута токи с частотой скольжения. [9]
Вращение якоря двигателя обусловливается взаимодействием тока в обмотке якоря с магнитным полем полюсов. Это взаимодействие у генератора образует тормозящий электромагнитный момент , который преодолевается вращающим моментом соединенного с ним приводного двигателя; у двигателя оно дает электромагнитный вращающий момент, преодолевающий нагрузочный момент на валу. Следовательно, если у генератора и двигателя токи в якорях и обмотках возбуждения полюсов будут иметь соответственно одинаковое направление, то направления вращения их прямо противоположны. Чтобы изменить направление вращения якоря двигателя, необходимо изменить направление тока или в якоре, или в обмотке возбуждения полюсов. [11]
Мощность, отдаваемая генератором в сеть, будет определяться механическим моментом, развиваемым турбиной, вращающей ротор. В случае изменения этого механического момента, приводящего во вращение ротор, генератор без участия каких-либо внешних сил автоматически изменяет свой собственный тормозящий электромагнитный момент . Сумма этих двух моментов становится равной нулю, и генератор продолжает вращаться с постоянной, синхронной скоростью. Эта зависимость носит название угловой характеристики и представляет собой функцию тормозящего электромагнитного момента Мэм генератора ( или электромагнитной мощности РэмМэм. Для турбогенераторов эта характеристика очень близка к синусоиде. Сама мощность Рэмтах и соответствующий ей максимальный момент Мэмтах — это максимально возможная мощность и максимально возможный тормозящий электромагнитный момент, развиваемые данным синхронным генератором. В области углов 9 от 0 до 90 синхронный генератор способен самостоятельно поддерживать синхронное вращение. За пределами угла 90 он теряет эту способность и выпадает из синхронизма. Способность самосинхронизировать свое вращение характеризуется удельной синхронизирующей способностью Р, которая показана на рис. 2.5.11 штриховой линией. [12]
При увеличении создаваемого первичным двигателем вращающего момента ротор машины вследствие сообщаемого ему ускорения увеличивает угол, и после нескольких колебаний около синхронной скорости восстанавливается равновесие вращающего момента первичного двигателя и тормозящего электромагнитного момента генератора . Таким же образом это равновесие восстанавливается при уменьшении вращающего момента первичного двигателя посредством уменьшения угла 6 и вызываемого этим снижения тормозящего электромагнитного момента. [13]
Ротор паротурбоагрегата состоит из нескольких последовательно соединенных роторов турбины и турбогенератора. При стационарном номинальном режиме работы турбоагрегата суммарный крутящий момент турбины и тормозящий электромагнитный момент генератора ( плюс момент сил трения) взаимно уравновешены. Внезапное короткое замыкание в цепи статора генератора, если оно произошло вблизи генератора, сопровождается появлением переменного электромагнитного момента, наибольшее значение которого в несколько раз превышает номинальный момент. Расчет переменного скручивающего момента в валопроводе турбоагрегата при его крутильных колебаниях в режиме внезапного короткого замыкания в цепи статора генератора является определяющим при оценке кратковременной прочности валопровода. [14]
При увеличении создаваемого первичным двигателем вращающего момента ротор машины вследствие сообщаемого ему ускорения увеличивает угол, и после нескольких колебаний около синхронной скорости восстанавливается равновесие вращающего момента первичного двигателя и тормозящего электромагнитного момента генератора. Таким же образом это равновесие восстанавливается при уменьшении вращающего момента первичного двигателя посредством уменьшения угла 6 и вызываемого этим снижения тормозящего электромагнитного момента . [15]
Генераторное торможение




![]()
![]()
Тормозные режимы асинхронных машин
При работе многих производственных механизмов возникает необходимость в быстрой остановке (торможении) двигателя. Для этой цели широко используются механические тормоза, но асинхронная машина может сама выполнять функции тормозного устройства, работая в одном из тормозных режимов. При этом механические тормоза используются как запасные или аварийные, а также для удержания механизма в неподвижном состоянии.
Различают следующие тормозные режимы асинхронных машин:
- генераторное торможение;
- динамическое торможение;
- торможение противовключением.
Машина переходит в режим генератора, если n > n0, т.е. если ротор вращается быстрее магнитного поля. Этот режим может наступить при регулировании скорости вращения увеличением числа пар полюсов или уменьшением частоты источника питания, а также в подъемно-транспортных машинах при опускании груза, когда под действием силы тяжести груза ротор начинает вращаться быстрее магнитного поля.
В режиме генератора изменяется направление электромагнитного момента, т.е. он становится тормозным, под действием чего происходит быстрое снижение скорости вращения. Одновременно изменяется фаза тока в обмотке статора, что приводит к изменению направления передачи электрической энергии. В режиме генератора происходит возврат энергии в сеть.
На рис. 2.25 представлены механические характеристики при генераторном торможении за счет опускания груза (а) и понижении частоты источника питания (б).
Рис. 2.25
Пусть двигатель с заданной нагрузкой на валу работал в точке А (рис. 2.25 а). Если под действием опускаемого груза ротор начнет вращаться быстрее магнитного поля и рабочая точка попадает в точку В, то nв > n0, машина будет развивать тормозной момент и частота вращения снизится до величины меньшей n0. Одно из достоинств генераторного торможения у асинхронных машин заключается в том, что переход в режим генератора происходит автоматически, как только ротор начинает вращаться быстрее магнитного поля. Это защищает асинхронные двигатели от аварийной ситуации, которая может наступить у двигателей постоянного тока. Асинхронные двигатели не могут пойти в разнос. Максимальная частота вращения ротора ограничивается частотой вращения магнитного поля.
Пусть двигатель работает с заданной нагрузкой на валу в точке А характеристики 1 (рис. 2.25 б). При снижении частоты источника питания рабочая точка должна перейти в точку C характеристики 2. Но если nА окажется больше новой пониженной частоты вращения магнитного поля n02, то машина из точки А переходит в точку В, работая на участке В – n02 в режиме генератора. За счет этого происходит быстрое снижение частоты вращения. На участке n02 – С машина работает в режиме двигателя, но происходит дальнейшее уменьшение частоты вращения ротора, пока вращающий момент не станет равным моменту нагрузки (т.С). Новое состояние равновесия с заданной нагрузкой наступает в точке С. Генераторное торможение является самым экономичным режимом, т.к. происходит преобразование механической энергии в электрическую и возврат энергии в сеть. Одним из достоинств этого тормозного режима является его самопроизвольное появление, т.е. не требуется никакая контролирующая аппаратура.
Мотор в качестве электромагнитного тормоза
Я занимаюсь разработкой бесколлекторных моторов в компании Impulsor. В последнее время к нам часто обращаются для разработки мотора/генератора, который будет выступать в качестве тормоза. В данной статье я расскажу об особенностях такого применения моторов, какие при этом преимущества и недостатки, и как реализовать такой режим работы.

Преимущества и варианты использования
Использование мотора в качестве тормоза даёт ряд преимуществ и параметров, которых не достичь, используя другие, доступные на данный момент, виды тормозов. Однако у данного подхода есть и недостатки.
- Быстрый режим включения/выключения и выставления тормозного момента.
- Широкий диапазон рабочих оборотов. Возможно сделать и сверх оборотистый тормоз ( до 100 000 rpm), так наоборот и очень медленный.
- Плавная установка нагрузки, отсутствие возможности случайной блокировки вала.
- Отсутствие пыли и отработанных материалов от тормоза. Можно использовать в помещении или замкнутом объёме.
- Можно использовать в качестве генератора.
Недостатки:
- Ограничения по рабочей температуре до 150, 200 градусов. Немного поднять температуру возможно, но при этом цена изделия возрастает очень сильно.
- Обычный тормоз из диска и колодок в тех же габаритах будет эффективнее.
- Сильные ограничения по моменту на низких оборотах и невозможность полностью заблокировать вал. Данное ограничение можно обойти с применением контроллера с внешним питанием.
- Постоянное наличие небольшого тормозного момента.
Благодаря своей скорости, точности и чистоте, такой тормоз незаменим в лабораториях и закрытых приборах. Близким аналогом мотора-тормоза, является порошковый тормоз. Он такой же быстрый, не создаёт пыль, но он не может работать на высоких оборотах и большинство существующих моделей и вовсе ограниченны 1500-3000rpm. Обычный дисковый тормоз не способен обеспечить такую же точность и стабильность работы.
Режимы работы
Для электромагнитного тормоза доступны 3 режима торможения, они различаются тем, куда идёт энергия от торможения:
- Режим замыкания и выделения тепла непосредственно в моторе.
- Выделение тепла на внешней нагрузке, сопротивлении или биполярном транзисторе.
- Рекуперация и зарядка аккумулятора.
Далее я подробнее расскажу об этих режимах для моторов синхронного типа с постоянными магнитами BLDC, также это применимо и к обычным DC.
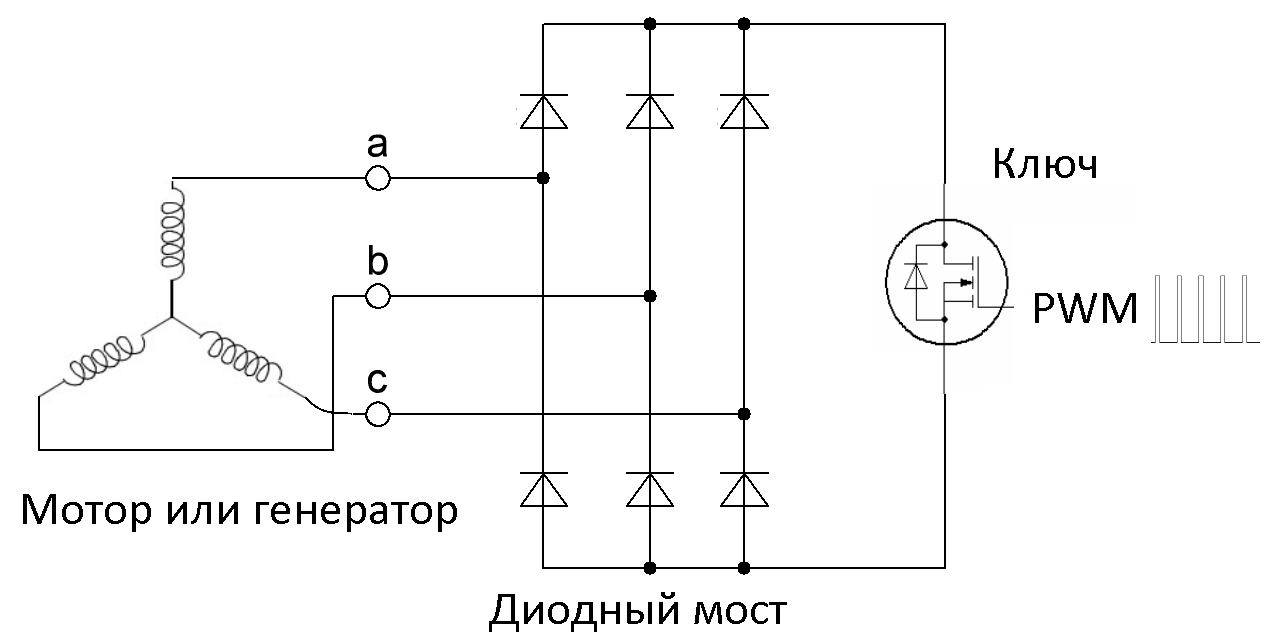
1. Режим замыкания
Это самый простой режим. В нём контакты мотора просто замыкаются, и тормозная мощность выделяется на сопротивлении обмотки мотора. Моторы изначально спроектированы с уклоном на охлаждение и к тому же они обладают достаточно большой массой и теплоёмкостью. Это позволяет достаточно интенсивно использовать такой режим без доработок мотора/генератора.
Для реализации данного режимы достаточно диодного моста и механического (кнопки, рубильника или реле) или электронного ключа (MOSFET, IGBT). Для корректировки тормозного усилия применяется ШИМ, который задаёт скважность открытия ключа. Схема подключения выглядит следующим образом:
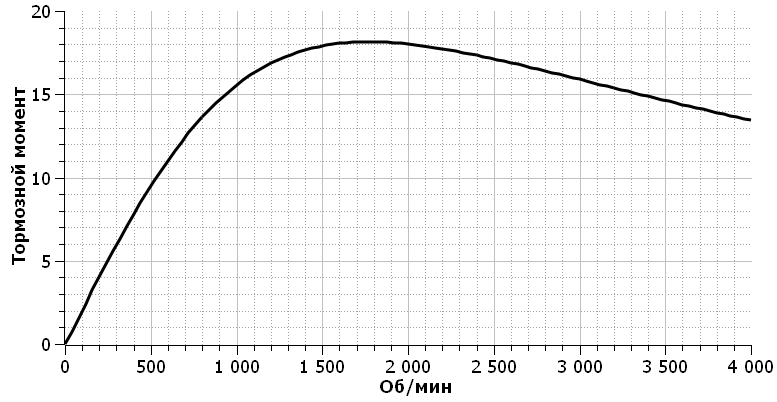
Данный режим имеет интересную особенность. С ростом оборотов максимальный тормозной момент будет падать. Это связанно с тем, что обмотка мотора имеет значительную индуктивность и с ростом оборотов, растёт и частота токов. В результате реактивное сопротивление обмотки превысит активное и мощность потерь будет ниже максимально возможной для этого мотора. Характерная зависимость максимального тормозного момента от оборотов показана на графике ниже:
Несмотря на то, что любой готовый мотор можно сразу использовать в таком режиме, такой режим не позволит раскрыть весь потенциал изделия. Однако характеристики работы тормоза в таком режиме можно значительно повысить, есть его изначально проектировать как тормоз.
У этого режима есть ещё один важный недостаток. Из-за быстрого и резкого замыкания и размыкания обмоток будут возникать сильные электромагнитные помехи. Также диодный мост должен быть рассчитан на большие импульсные токи.
2. С внешней нагрузкой
В данном режиме основным источником выделения тепла от торможения служит внешнее сопротивление. Этот режим гораздо более эффективный, так как тормозная мощность более не ограниченна теплоотводом тепла мотора, а радиатор на сопротивлении можно сделать сколь угодно большим. Кроме того, если правильно подстраивать величину сопротивления, то максимальный тормозной момент будет выше, чем просто при замыкании и чем выше обороты, тем существеннее это будет проявляться.
Для реализации данного режима также необходим диодный мост, но после него включается либо механический реостат, либо биполярный транзистор со схемой контроля тока, либо сопротивления (схема электронной нагрузки). Схема подключения выглядит следующим образом:

При малой величине внешнего сопротивления относительно сопротивления мотора, характер тормозного момента будет близок к первому режиму. При увеличении сопротивления точка пикового момента будет смещаться к большим оборотам, и максимальная тормозная мощность будет расти. Динамика изменения тормозного момента с ростом сопротивления нагрузки показана на графике ниже:
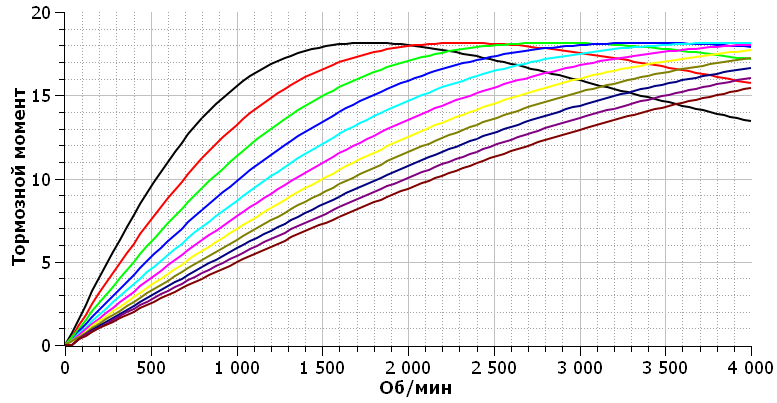
Данный режим позволяет получить на нужном диапазоне рабочих оборотов участок, на котором тормозной момент возрастает с ростом оборотов. Этот режим работы крайне удачный, так как он позволяет стабилизировать обороты или ограничить их. Образуется стабильная система с обратной связью.
3. Рекуперация
Данный режим самый сложный в реализации. Он требует контроллера (ESC) наподобие тех, что применяется для управления бесколлекторными моторами BLDC. Но при этом данный режим и самый эффективный. Он способен устранить большинство недостатков тормоза такого типа. Так, например, контроллер позволит полностью блокировать вал мотора, он позволит использовать тормоз одновременно в режиме генерации и контролируемого торможения и в данном режиме можно достигнуть тормозных моментов значительно выше, чем в предыдущих 2х.
В данной статье я не буду подробно описывать устройство контроллера и алгоритмы его работы, т.к. эта тема для отдельной статьи, а возможно и не одной. Для желающих разобраться в данном вопросе можно изучить принцип работы контроллера в электротранспорте (велосипедах, самокатах) и то как в них реализованы алгоритмы торможения и рекуперации.
Механические характеристики при торможении синхронных машин

Как и в обычных электродвигателях в синхронных машинах помимо пусковых характеристик существуют и тормозные характеристики. Для осуществления нормального тормозного режима синхронного электропривода необходимо выбрать нужный режим электрического торможения машины.
Итак, торможение синхронного электродвигателя может быть осуществлено несколькими способами:
- Противовключением – реализуется как и режим противовключения асинхронной машины;
- Динамическое торможение;
- Рекуперативное торможение (с отдачей энергии в сеть) – такой вид торможения может быть реализован при наличии преобразователя частоты, позволяющего осуществить рекуперацию энергии в сеть;
Торможение противовключением
Торможение противовключением применяется довольно редко, так как оно может вызывать значительные толчки тока в сеть, иногда превышающие значение тока при пуске, довольно сильный нагрев пусковой обмотки, следствием чего является довольно низкий cosφ и сравнительно малый тормозной момент. На рисунке ниже показаны схемы:

На рисунке а) показан двигательный режим, на рисунке б) показан режим торможения синхронной машины противовключением.
Режим динамического торможения
Режим динамического торможения синхронного электродвигателя от асинхронного отличается тем, что в синхронном электродвигателе статорная обмотка отключается от сети и подключается к тормозным резисторам, на которых гасится энергия, вырабатываемая электрической машиной при торможении. Схема приведена ниже:

При работе в двигательном режиме выключатель QF замкнут. При переходе электродвигателя в режим динамического торможения выключатель QF размыкается, а QF1 замыкается, при этом напряжение с обмотки возбуждения не снимается. В итоге машина переходит в генераторный режим, а энергия, которая вырабатывается при этом, гасится на резисторах R1, R2, R3, создавая тем самым тормозной момент. При таком режиме работы расход электроэнергии значительно ниже, чем при противовключении. Интенсивность замедления зависит от величины сопротивлений R1, R2, R3. Также на интенсивность влияет и параметры источника постоянного тока возбуждения. Если возбудитель находится на валу машины (собственный возбудитель), то время замедления значительно возрастет, так при уменьшения скорости вращения синхронного электродвигателя будет падать ток возбуждения. Если возбудитель питается от другого источника тока, то момент торможения поддерживается постоянным.
Рекуперативное торможение
Схема показана ниже:

Приведенная схема может реализовывать две схемы торможения – рекуперативное или динамическое. При использовании схемы инвертора позволяющего проводить рекуперацию энергии, оно будет произведено, но такая схема будет немного дороже чем схема с динамическим замедлением (показана пунктиром). Если электропривод имеет частые пуски и остановы, то применять схему с рекуперативным торможением более целесообразно, чем при длительных или кратковременных режимах работы. При выборе схемы питания необходимо произвести технико – экономические расчеты целесообразности применения какой – то из схем.





