Эдс генератора от мощности
Расчёт генератора, основные параметры и изготовление
Для расчёта напряжения генератора воспользуемся простой формулой, она очень простая и не должна вызвать проблем. Подробнее с примером можно почитать здесь — Расчёт ЭДС генератора. Про фазы и соединения катушек будет ниже, а пока разберемся с напряжением генератора.
Формула E=B·V·L где: Е-напряжение генератора (V). B-магнитная индукция магнитов(Тл). V-скорость движения магнитов (м/с). L-активная длина проводника (м).
С буквой Е — это напряжение генератора, которое нам нужно вычислить, а далее буква В — которая не известна, так-как мы не знаем какая магнитная индукция магнитов. Но если помучить поисковик и почитать форумы, то можно узнать что магнитная индукция неодимовых магнитов около 1,25Тл, конечно она разная для разных марок магнитов, но это среднее значение. Так-же известно что чем дальше от магнита — тем меньше и магнитная индукция. В общем если в случае изготовления дискового генератора расстояние между магнитами на противоположных дисках будет равно толщине магнитов, то магнитная индукция будет примерно 1.0Тл, если расстояние больше, то естественно магнитное поле будет слабее. Если к примеру у вас магниты толщиной 10мм, и вы делаете расстояние между магнитами 10мм, то индукция будет где то 1.0Тл, а статор в этом случае получится не более 8мм толщиной, и по 1мм на зазоры. Если расстояние будет скажем 12-14мм, то магнитная индукция упадет до 0.8-0.7Тл и ниже.
Для генераторов с железом принцип такой-же, но толщина магнитов может быть разная, некоторые ставят магниты толщиной 10-15мм, хотя для магнитной индукции в 1.0Тл достаточно толщины магнитов 3-4мм. Ещё важна толщина — магнито-пропускаемость статора, на зубы которого наматываются катушки. Если переборщить с толщиной магнитов то статор не сможет замкнуть всё магнитное поле и оно выйдет наружу, и к статору снаружи будет магнитися железо. То-есть это потери магнитного поля и нет смысла использовать слишком мощные магниты так-как часть магнитного поля не будет использоваться. Все конечно зависит от конкретных условий, но если не известна магнитная индукция, то лучше её брать как 0.8-1Тл.
Вернемся к формуле, V — это скорость движения магнитов, рассчитать её очень просто. К примеру если диаметр ротора с магнитами у нас 20см, то 20*3.14=62.8см. То-есть получается что за один оборот магниты проходят расстояние 62.8см или 0.62метра. Если диаметр ротора 8см, то аналогично 8*3.14=25.12см или 0.25м.
L — это активная длина проводника, то-есть это та длинна медного провода, которая попадает под магниты, ведь именно только тот участок провода вырабатывает электричество, который попадает под магнитное поле магнитов. Для дисковых аксиальных генераторов длинна активного проводника равна длинне магнитов. К примеру если у вас круглые магниты размером 30*10мм, то L=30мм, ну а если прямоугольные размером 50*30*10мм, то L=50мм. Для генераторов с железным статором активная длинна проводника равна ширине статора.
Активная длинна проводника
Теперь попробуем высчитать напряжение генератора, но сначало разберемся с катушками генератора
Ниже схема соединения однофазного генератора
Соединение катушек
Соединение катушек трехфазного генератора
Соединение катушек
Вернёмся к формуле E=B·V·L. К примеру планируется намотать 18 катушек проводом 1.0 мм, и в катушку помещается по 80 витков, значит всего у нас витков 18*80=1440 витков. Если генератор однофазный то так и считаем по всем катушкам, а если трёхфазный то будем брать катушки одной фазы, в данном случае шесть катушек в фазе, а потом вычислим данные при соединении звездой или треугольником. Я буду считать трёхфазный, по этому беру шесть катушек 80*6=480витков.
Магниты у нас к примеру 30*10мм (по 12шт на диске), значит активная длинна проводника 0.03м, если статор железный, то берётся ширина статора. Диски с магнитами у нас к примеру диаметром 20см, но надо брать диаметр по центру магнитов, значит минус 1,5см по кругу и того 20-3см=17*3.14=53.38см или 0.53м. Хочу напомнить что толщина железных дисков должна быть не менее толщины магнитов, иначе магнитное поле выйдет за железо и не будет участвовать в выработке электричества и магнитная индукция будет ниже, а если у вас к примеру ротор асинхронного двигателя, то после проточки желательно одеть металлическую гильзу и на неё клеить магниты, или вытачивать цельно-металлический ротор, так магниты будут использоваться эффективнее и можно или получить больше мощности или сэкономить на толщине магнитов.
И так теперь у нас есть необходимые данные для расчёта напряжения генератора к примеру при 60об/м. Магнитную индукцию возьмём равной 1Тл. Скорость движения магнитов у нас за оборот 0.53м, значит при 60об/м будет 1об/с, то-есть 0.53м/с — скорость движения магнитов. Активная длинна проводника нам тоже известна и равна 0.03м. Тогда 0.03м нужно умножить на количество витков в катушке (80) и на количество катушек (6), и получится 0.03*480=14.4м.
Теперь представляем значения в формулу E=B(1Тл)*V(0.53м)*L(14.4м), получается E=7.632V. В общем при 60об/м получается напряжение фазы 7.6 вольт. Напряжение генератора растёт линейно в зависимости от оборотов, значит при 120об/м будет 15.2 вольта, а при 240об/м будет 30.4 вольт. А при 300об/м будет 38.0 вольт. Зарядка начнётся при 120об/м если соединить фазы генератора треугольником. При соединении звездой напряжение генератора будет выше в 1,7 раза, значит зарядка начнётся ещё раньше, при 90об/м.
Но если нарисовать виртуальный статор с катушками и магнитами, то можно увидеть что магнит не перекрывает собой полностью катушку и 30% активной зоны не перекрывается как бы не стоял магнит, а это значит что 30% не участвует в выработке напряжения и это надо учитывать. Часто получается так что магнит перекрывает только половину катушки, и это значит что только половина витков участвует в выработке электричества. Значит в нашем случае напряжение будет ниже на 30% чем получилось, то-есть не E=7.632V, а E=5V.
Теперь поговорим про ток генератора, его сопротивление и соединение звездой и треугольником
Чем меньше сопротивление — тем выше сила тока зарядки и меньше потерь на нагрев, по-этому сопротивление обмотки генератора нужно делать как можно меньше. В нашем генераторе состоящем из 18 катушек всего 18*80=1440 витков, это по 480 витков в фазе. Чтобы узнать сопротивление фазы нужно узнать длинну провода в фазе и его сечение. Длина одного витка в среднем примерно 0.08м, значит 0.08*480=38.4м. Сопротивление одного метра медного провода сечением 1мм равно 0.0224Ом. Далее 38.4*0.0224=0.86Ом.
Таблица сопротивления медного провода

Чтобы узнать какой будет ток зарядки аккумулятора нужно знать напряжение генератора и его сопротивление, что мы уже знаем. Чтобы вычислить нужно от напряжения холостого хода генератора отнять напряжение генератора, и полученную сумму разделить на сопротивление, и получится ток зарядки. К примеру у нас при соединении звездой при 120об/м напряжение в холостую равно 10V*1.7=17 вольт. Тогда от 17 вольт отнимем напряжение аккумулятора 17-13 вольт и получим разницу в 4 вольта, разделим на сопротивление 1,46Ом, и получим 4:1.46=2.7Ампер. И так можно вычислить силу тока на каждых оборотах генератора, а чтобы получить мощность зарядки нужно амперы умножить на вольты, в данном случае 2.7*13=35.1 ватт*ч. А уже при 240об/м напряжение в холостую будет в два раза больше, так-как растёт линейно, тогда уже 20V-13=7:1.46=4.7 Ампер.
Но здесь играет роль не только сопротивление самого генератора, но и сопротивление провода от генератора до аккумулятора, сопротивление диодного моста, на котором падает до 1вольт напряжения, и сопротивление самого аккумулятора. Все это высчитать можно, но довольно сложно. Так-же изменяется сопротивление генератора во время работы, по-этому сумма общих потерь может составлять до 50% от мощности, и в итоге ток зарядки может оказаться в два раза меньше расчетного. И так-как это трудно все учесть на потери в среднем можно скинуть 30%, значит реально а аккумулятор пойдёт ток не 4.7Ампер при 240об/м, а значительно ниже, около 3.5-4 Ампера.
Такой расчёт дает примерное представление о будущем генераторе, но все-же это лучше чем делать как получится ничего не считая, и потом удивляться тому что или напряжение слишком низкое или высокое, или сопротивление слишком большое и смешной ток зарядки. Просчитав свои генераторы я убедился в справедливости такого расчёта генератора.
При расчете генератора нужно учитывать что его будет крутить ветроколесо ветрогенератора, и у ветроколеса есть свои обороты, и генератор нужно хоть примерно делать под будущий винт. Если это будет вертикальный ветряк, то его ветроколесо вращается очень медленно по сравнению с горизонтальным винтом. И в связи с этим нужно чтобы зарядка начиналась на очень низких оборотах генератора. Чтобы зарядка начиналась рано нужно чтобы напряжение было выше напряжения аккумулятора, отсюда нужно в катушках иметь как можно больше витков. Но чем больше витков тем длиннее провод, а значит и сопротивление, а сопротивление определяет силу тока зарядки. В итоге чтобы генератор был мощный и рано начиналась зарядка, нужно его рассчитать так чтобы и мощность была, и ветроколесо не перегрузить — иначе оно не выйдет на свои обороты и не наберет мощности.
С горизонтальным винтом генератор нужен не такой большой и материалоемкий как для вертикального, у горизонтальных винтов обороты в среднем в 5 раз выше, от этого и генератор нужен в пять раз меньше и во столько же раз дешевле. Расчёты витроколёс есть в даругих статьях из раздела «Расчёты ветряков». Советую вам и с этим материалом ознакомится, так-как ветрогенератор это единый механизм и его узлы должны быть подходящими по параметрам друг для друга, иначе или винт слишком мощный и малооборотистый или генератор слишком мощный, и толку от такого ветряка будет мало.
Предварительный шаблон генератора
Рисунок генератора
Размеры катушки

Чтобы подогнать генератор под ветроколесо или наоборот потом ветроколесо под генератор нужно высчитать мощность генератора на разных оборотах, к примеру при 120об/м когда начнётся зарядка аккумулятора, и начнётся нагрузка на ветроколесо, и далее при 180,240,300,360,420,480,540,600об/м.
Исходя из выше рассчитанных данных мы получили 17вольт при 120об/м, сопротивление у нас 1.46Ом. более точные данные будут если мерить напряжение во время зарядки в реальном времени, но я для малого тока взял напряжение аккумулятора равным 13 вольт, а далее исходил из напряжения 14 вольт. В итоге ниже получились вот такие расчёты, но на более высоких оборотах при большой разнице холостого напряжения и напряжения при заряде аккумулятора КПД генератора будет падать и ток зарядки опять-же не будет таким большим, хотя генератор будет грузить винт на большую мощность, потери будут на нагреве катушек и в проводах. В общем ток зарядки будет ниже ещё на 10-20%.
при 120об/м — 17-13=4:1.46=2.7А*13=35ватт
при 180об/м — 25.5-14=11.5:1.46=7.8А*14=110ватт
при 240об/м — 34-14=20:1.46=13.6А*14=190ватт
при 300об/м — 42.5-14=28.5:1.46=19.5А*14=273ватт
при 360об/м — 51-14=37:1.46=25.3А*14=354ватт
при 420об/м — 59-14=45:1.46=31А*14=436ватт
при 480об/м — 68-14=54:1.46=36.9А*14=516ватт
при 600об/м — 85-14=71:1.46=48.6А*14=680ватт
Но ветроколесо желательно при расчёте делать на 30% мощнее чем расчетные данные генератора, и так чтобы на низких оборотах ветроколесо было чуть мощнее генератора. У нас при 120об/м 35ватт с генератора, значит ветроколесо должно при 120об/м иметь мощность около 40-50ватт. Если ветроколесо будет слабее, то генератор не позволит ему раскрутится до своих оборотов и в итоге обороты будут ниже и мощность тоже. Подробнее про расчёты ветроколес смотрите статьи в разделе, там всё есть.
Эдс генератора от мощности
Воропаев Е.Г.
Электротехника
Если в рассмотренных выше асинхронных машинах ротор имел частоту вращения, отличную от частоты вращения магнитного поля статора, то в синхронных эти частоты равны между собой.
Синхронные машины могут работать как генераторами, так и двигателями.
В зависимости от типа привода синхронные генераторы получили и свои названия.
Турбогенератор, например, — это генератор, приводимый в движение паровой турбиной, гидрогенератор вращает водяное колесо, а дизель — генератор механически связан с двигателем внутреннего сгорания.
Синхронные двигатели широко применяют для привода мощных компрессоров, насосов, вентиляторов.
Синхронные микродвигатели используют для привода лентопротяжных механизмов регистрирующих приборов, магнитофонов и т.д.
6.1. КОНСТРУКЦИЯ И ПРИНЦИП ДЕЙСТВИЯ СИНХРОННОГО ГЕНЕРАТОРА
Статор синхронной машины по конструкции не отличается от статора асинхронного двигателя. В пазах статора размещается трехфазная, двухфазная или однофазная обмотки.
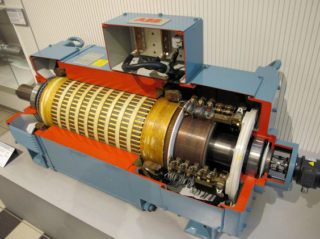
Заметное отличие имеет ротор, который принципиально представляет собой постоянный магнит или электромагнит.
Это налагает особые требования на геометрическую форму ротора. Любой магнит имеет полюса, число которых может быть два и более.
На рис. 6.1.1 приведены две конструкции генераторов, с тихоходным и быстроходным ротором.

Быстроходными бывают, как правило, турбогенераторы. Количество пар магнитных полюсов у них равно единице. Чтобы такой генератор вырабатывал электрический ток стандартной частоты f = 50 Гц, его необходимо вращать с частотой

На гидроэлектростанциях вращение ротора зависит от движения водяного потока. Но и при медленном вращении такой генератор должен вырабатывать электрический ток стандартной частоты f = 50 Гц.
Поэтому для каждой гидроэлектростанции конструируется свой генератор, на определенное число магнитных полюсов на роторе.
В качестве примера приведем параметры синхронного генератора, работающего на Днепровской ГЭС.
Водяной поток вращает ротор генератора с частотой n = 33,3 об / мин. Задавшись частотой f = 50 Гц, определим число пар полюсов на роторе:

Принцип действия синхронного генератора основан на явлении электромагнитной индукции. Ротор с магнитными полюсами создает вращающееся магнитное поле, кото-рое, пересекая обмотку статора, наводит в ней ЭДС. При подключении к генератору нагрузки генератор будет являться источником переменного тока.
6.2. ЭДС СИНХРОННОГО ГЕНЕРАТОРА
Как было показано выше, величина наводимой в обмотке статора ЭДС количественно связана с числом витков обмотки и скорости изменения магнитного потока:

Переходя к действующим значениям, выражение ЭДС можно записать в виде:

где n — частота вращения ротора генератора,
Ф — магнитный поток,
c — постоянный коэффициент.
При подключении нагрузки напряжение на зажимах генератора в разной степени меняется. Так, увеличение активной нагрузки не оказывает заметного влияния на напряжение. В то же время индуктивная и емкостная нагрузки влияют на выходное на-пряжение генератора. В первом случае рост нагрузки размагничивает генератор и снижает напряжение, во втором происходит его подмагничивание и повышение напряжения. Такое явление называется реакцией якоря.
Для обеспечения стабильности выходного напряжения генератора необходимо регулировать магнитный поток. При его ослаблении машину надо подмагнитить, при увеличении — размагнитить. Делается это путем регулирования тока, подаваемого в обмотку возбуждения ротора генератора.
6.3. СИНХРОННЫЙ ДВИГАТЕЛЬ
6.3.1. КОНСТРУКЦИЯ И ПРИНЦИП ДЕЙСТВИЯ
Конструкция синхронного двигателя такая же, как и у синхронного генератора.
При подаче тока в трехфазную обмотку статора в нем возникает вращающееся магнитное поле. Частота вращения его определяется формулой:

где f — частота тока питающей сети,
р — число пар полюсов на статоре.
Ротор, являющийся часто электромагнитом, будет строго следовать за вращаю-щимся магнитным полем, т.е. его частота вращения n2 = n1.
Рассмотрим принцип действия синхронного двигателя на следующей условной модели (рис. 6.3.1.). Пусть магнитное поле статора будет смоделировано системой вращающихся магнитных полюсов N — S.

Ротор двигателя тоже представляет собой систему электромагнитов S — N, кото-рые «сцеплены» с полюсами на статоре. Если нагрузка на двигателе отсутствует, то оси полюсов статора будут совпадать с осями полюсов ротора (  = 0).
= 0).
Если же к ротору подключена механическая нагрузка, то оси полюсов статора и ротора могут расходиться на некоторый угол .
Однако «магнитное сцепление» ротора со статором будет продолжаться, и частота вращения ротора будет равна синхронной частоте статора (n2 = n1). При больших значениях ротор может выйти из «сцепления» и двигатель остановится.
Главное преимущество синхронного двигателя перед асинхронным — это обеспечение синхронной скорости вращения ротора при значительных колебаниях нагрузки.
6.3.2. СИСТЕМА ПУСКА СИНХРОННОГО ДВИГАТЕЛЯ
Как мы показали выше, синхронное вращение ротора обеспечивается «магнитным сцеплением» полюсов ротора с вращающимся магнитным полем статора.
В первый момент пуска двигателя вращающееся магнитное поле статора возникает практически мгновенно. Ротор же, обладая значительной инерционной массой, прийти в синхронное вращение сразу не сможет. Его надо «разогнать» до подсинхронной скорости каким-то дополнительным устройством.
Долгое время роль разгонного двигателя играл обычный асинхронный двигатель, механически соединенный с синхронным.
Ротор синхронного двигателя приводится во вращение до подсинхронной скорости. Далее двигатель сам втягивается в синхронизм.
Обычно мощность пускового двигателя составляет 5-15 % от мощности синхронного двигателя. Это позволяет пускать в ход синхронный двигатель только вхолостую или при малой нагрузке на валу.
Применение пускового двигателя мощностью, достаточной для пуска синхронного двигателя под нагрузкой делает такую установку громоздкой и дорогой.
В последнее время используется так называемая система асинхронного пуска синхронных двигателей. С этой целью в полюсные наконечники забивают стержни, напоминающие собою короткозамкнутую обмотку асинхронного двигателя (рис. 6.3.2.1).

В начальный период пуска синхронный двигатель работает как асинхронный, а в последующем — как синхронный. В целях безопасности обмотку возбуждения в начальном периоде пуска закорачивают, а на заключительном подключают к источнику по-стоянного тока.
6.4. РЕАКТИВНЫЙ СИНХРОННЫЙ ДВИГАТЕЛЬ
В лабораторной практике, в быту и в маломощных механизмах применяют так называемые реактивные синхронные двигатели.
От обычных классических машин они отличаются лишь конструкцией ротора. Ротор здесь не является магнитом или электромагнитом, хотя по форме напоминает собой полюсную систему.
Принцип действия реактивного синхронного двигателя отличен от рассмотренного выше. Здесь работа двигателя основана, на свободной ориентации ротора таким образом, чтобы обеспечить магнитному потоку статора лучшую магнитную проводимость (рис. 6.4.1).

Действительно, если в какой-то момент времени максимальный магнитный поток будет в фазе А — X, то ротор займет положение вдоль потока ФА. Через 1/3 периода максимальным будет поток в фазе В — У. Тогда ротор развернется вдоль потока ФВ. Еще через 1/3 периода произойдет ориентация ротора вдоль потока. ФС. Так непрерывно и синхронно ротор будет вращаться с вращающимся магнитным полем статора.
В школьной практике иногда, при отсутствии специальных синхронных двигателей, возникает необходимость в синхронной передаче.
Эту проблему можно решить с помощью обычного асинхронного двигателя, если придать ротору следующую геометрическую форму (рис. 6.4.2).

6.5. ШАГОВЫЙ ДВИГАТЕЛЬ
Этот тип двигателя является машиной постоянного тока, хотя принцип действия его напоминает синхронный реактивный двигатель.
Как видно из рис. 6.5.1, статор двигателя имеет шесть пар выступающих полюсов.

Каждые две катушки, расположенные на противоположных полюсах статора, образуют обмотку управления, включаемую, в сеть постоянного тока. Ротор — двухполюсный.
Если подключить к источнику постоянного тока катушки полюсов 1 — 1′, то ротор расположится вдоль этих полюсов. Если задействовать катушки полюсов 2 — 2′, а ка-тушки полюсов 1 — 1′ обесточить, то ротор повернется и займет положение вдоль полю-сов 2 — 2′. Такой же поворот ротора произойдет, если включить в сеть катушки полюсов 3 — 3′. Так, шагами, ротор будет «следовать» за своей обмоткой управления.
Преимуществом шаговых двигателей является то, что в них совершенно отсутствует «самоход». Они поворачиваются и строго фиксируются с шагом, пропорциональ-ным числу полюсов на статоре. Это качество делает его незаменимым в особо точных механизмах (для привода часов, механизмов подачи ядерного топлива в реакторах, в станках с ЧПУ и т.д.).
Управление шаговыми двигателями ведется с применением различных электронных устройств (триггеров Шмидта и др.).
6.6. КОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ ПЕРЕМЕННОГО ТОКА
Безколлекторные асинхронные и синхронные двигатели при многих положительных качествах имеют существенные недостатки. Они не допускают достаточно плавного и экономичного регулирования вращения.
Этот пробел частично восполняют коллекторные двигатели переменного тока.
Коллекторные двигатели бывают однофазными и трехфазными.
Ротор однофазного коллекторного двигателя выполнен в виде цилиндра с фазными обмотками, статор — явнополюсный.
Так как обмотка полюсов статора, подключаемая к сети переменного тока, создает пульсирующее магнитное поле, то все элементы магнитной цепи машины набираются из отдельных листов электротехнической стали.
Вращающий момент в однофазном коллекторном двигателе создается взаимодействием токов в обмотке ротора с магнитным потоком полюсов. На рис. 6.6.1- показана схема подключения к сети коллекторного двигателя.

Коллекторные двигатели могут работать как от сети переменного тока, так и от сети постоянного тока. Это обстоятельство послужило для присвоения им наименования универсальных коллекторных двигателей. Коллекторные двигатели широко при-меняются для привода швейных машин, пылесоса и т.д.
Что такое электродвижущая сила (ЭДС) и как ее рассчитать
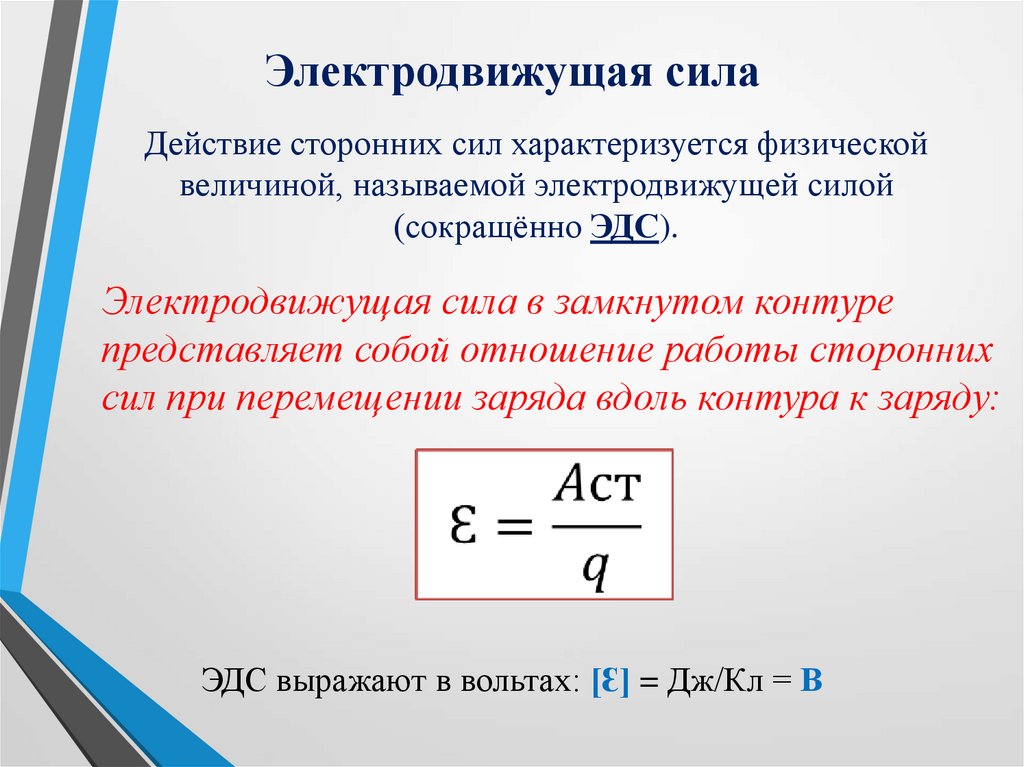
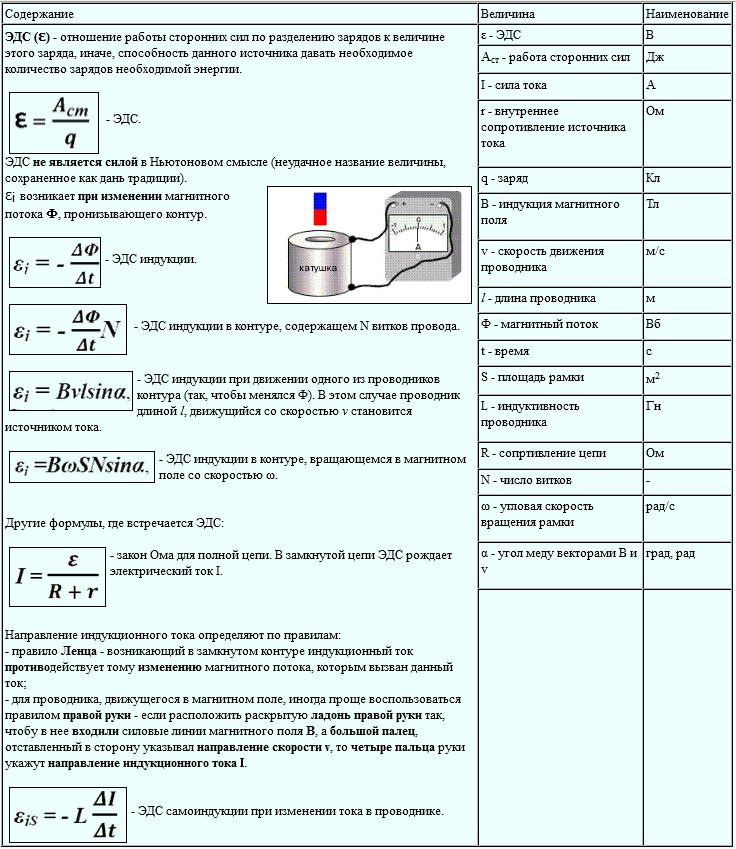
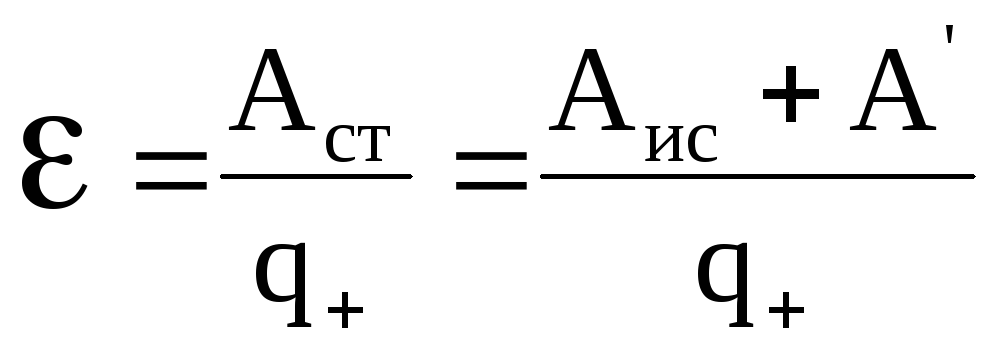
Электродвижущая сила или сокращено ЭДС – это способность источника тока ил по-другому питающий элемент, создавать в электрической цепи разность потенциалов. Элементами питания являются аккумуляторы или батареи. Это скалярная физическая величина, равная работе сторонних сил для перемещения одного заряда с положительной величиной. В данной статье будут рассмотрены теоритические вопросы ЭДС, как она образуется, а также для чего она может быть использована на практике и где используются, а главное как рассчитать ее.
Что такое ЭДС: объяснение простыми словами
Под ЭДС понимается удельная работа сторонних сил по перемещению единичного заряда в контуре электрической цепи . Это понятие в электричестве предполагает множество физических толкований, относящихся к различным областям технических знаний. В электротехнике — это удельная работа сторонних сил, появляющаяся в индуктивных обмотках при наведении в них переменного поля. В химии она означает разность потенциалов, возникающее при электролизе, а также при реакциях, сопровождающихся разделением электрических зарядов.
В физике она соответствует электродвижущей силе, создаваемой на концах электрической термопары, например. Чтобы объяснить суть ЭДС простыми словами – потребуется рассмотреть каждый из вариантов ее трактовки. Прежде чем перейти к основной части статьи отметим, что ЭДС и напряжение очень близкие по смыслу понятия, но всё же несколько отличаются. Если сказать кратко, то ЭДС — на источнике питания без нагрузки, а когда к нему подключают нагрузку — это уже напряжение. Потому что количество вольт на ИП под нагрузкой почти всегда несколько меньше, чем без неё. Это связано с наличием внутреннего сопротивления таких источников питания, как трансформаторы и гальванические элементы.
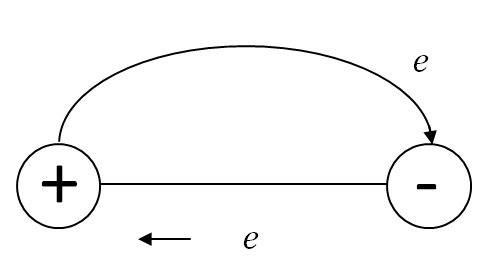
Электродвижущая сила (эдс), физическая величина, характеризующая действие сторонних (непотенциальных) сил в источниках постоянного или переменного тока; в замкнутом проводящем контуре равна работе этих сил по перемещению единичного положительного заряда вдоль контура. Если через Eстр обозначить напряжённость поля сторонних сил, то эдс в замкнутом контуре (L) равна , где dl — элемент длины контура. Потенциальные силы электростатического (или стационарного) поля не могут поддерживать постоянный ток в цепи, т. к. работа этих сил на замкнутом пути равна нулю. Прохождение же тока по проводникам сопровождается выделением энергии — нагреванием проводников.
Сторонние силы приводят в движение заряженные частицы внутри источников тока: генераторов, гальванических элементов, аккумуляторов и т. д. Происхождение сторонних сил может быть различным. В генераторах сторонние силы — это силы со стороны вихревого электрического поля, возникающего при изменении магнитного поля со временем, или Лоренца сила, действующая со стороны магнитного поля на электроны в движущемся проводнике; в гальванических элементах и аккумуляторах — это химические силы и т. д. Эдс определяет силу тока в цепи при заданном её сопротивлении (см. Ома закон). Измеряется эдс, как и напряжение, в вольтах.
Природа ЭДС
Причина возникновения ЭДС в разных источниках тока разная. По природе возникновения различают следующие типы:
- Химическая ЭДС. Возникает в батарейках и аккумуляторах вследствие химических реакций.
- Термо ЭДС. Возникает, когда находящиеся при разных температурах контакты разнородных проводников соединены.
- ЭДС индукции. Возникает в генераторе при помещении вращающегося проводника в магнитное поле. ЭДС будет наводиться в проводнике, когда проводник пересекает силовые линии постоянного магнитного поля или когда магнитное поле изменяется по величине.
- Фотоэлектрическая ЭДС. Возникновению этой ЭДС способствует явление внешнего или внутреннего фотоэффекта.
- Пьезоэлектрическая ЭДС. ЭДС возникает при растяжении или сдавливании веществ.
Электромагнитная индукция (самоиндукция)
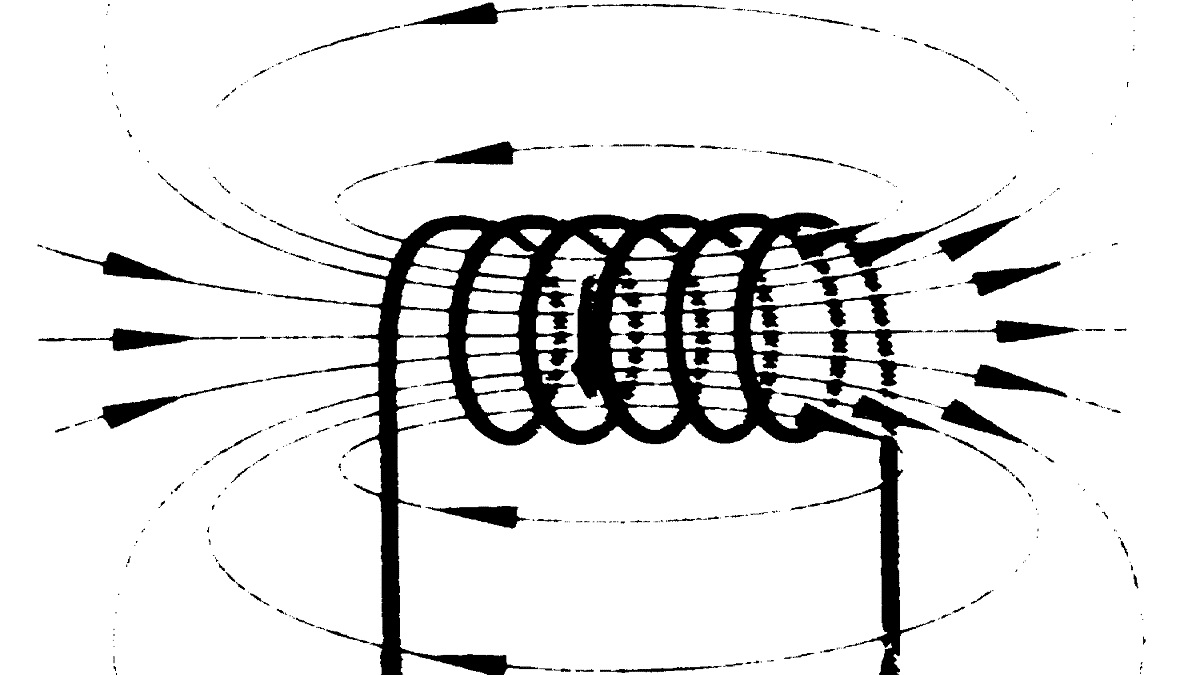
Начнем с электромагнитной индукции. Это явление описывает закон электромагнитной индукции Фарадея. Физический смысл этого явления состоит в способности электромагнитного поля наводить ЭДС в находящемся рядом проводнике. При этом или поле должно изменяться, например, по величине и направлению векторов, или перемещаться относительно проводника, или должен двигаться проводник относительно этого поля. На концах проводника в этом случае возникает разность потенциалов.
Опыт демонстрирует появление ЭДС в катушке при воздействии изменяющегося магнитного поля постоянного магнита. Есть и другое похожее по смыслу явление — взаимоиндукция. Оно заключается в том, что изменение направления и силы тока одной катушки индуцирует ЭДС на выводах расположенной рядом катушки, широко применяется в различных областях техники, включая электрику и электронику. Оно лежит в основе работы трансформаторов, где магнитный поток одной обмотки наводит ток и напряжение во второй.
В электрике физический эффект под названием ЭДС используется при изготовлении специальных преобразователей переменного тока, обеспечивающих получение нужных значений действующих величин (тока и напряжения). Благодаря явлениям индукции и самоиндукции инженерам удалось разработать множество электротехнических устройств: от обычной катушки индуктивности (дросселя) и вплоть до трансформатора. Понятие взаимоиндукции касается только переменного тока, при протекании которого в контуре или проводнике меняется магнитный поток.
ЭДС в быту и единицы измерения
Другие примеры встречаются в практической жизни любого рядового человека. Под эту категорию попадают такие привычные вещи, как малогабаритные батарейки, а также другие миниатюрные элементы питания. В этом случае рабочая ЭДС формируется за счет химических процессов, протекающих внутри источников постоянного напряжения. Когда оно возникает на клеммах (полюсах) батареи вследствие внутренних изменений – элемент полностью готов к работе. Со временем величина ЭДС несколько снижается, а внутреннее сопротивление заметно возрастает.
В результате если вы измеряете напряжение на не подключенной ни к чему пальчиковой батарейке вы видите нормальные для неё 1.5В (или около того), но когда к батарейке подключается нагрузка, допустим, вы установили её в какой-то прибор — он не работает. Почему? Потому что если предположить, что у вольтметра внутреннее сопротивление во много раз выше, чем внутреннее сопротивлении батарейки — то вы измеряли её ЭДС. Когда батарейка начала отдавать ток в нагрузке на её выводах стало не 1.5В, а, допустим, 1.2В — прибору недостаточно ни напряжения, ни тока для нормальной работы.
Как раз вот эти 0.3 В и упали на внутреннем сопротивлении гальванического элемента. Если батарейка совсем старая и её электроды разрушены, то на клеммах батареи может не быть вообще никакой электродвижущей силы или напряжения — т.е. ноль. Совсем небольшая по величине электродвижущая сила наводится и в рамках антенны приемника, которая усиливается затем специальными каскадами, и мы получаем наш телевизионный, радио и даже Wi-Fi сигнал.
Как образуется ЭДС
Идеальный источник ЭДС – генератор, внутреннее сопротивление которого равно нулю, а напряжение на его зажимах не зависит от нагрузки. Мощность идеального источника ЭДС бесконечна. Реальный источник ЭДС, в отличие от идеального, содержит внутреннее сопротивление Ri и его напряжение зависит от нагрузки (рис. 1., б), а мощность источника конечна. Электрическая схема реального генератора ЭДС представляет собой последовательное соединение идеального генератора ЭДС Е и его внутреннего сопротивления Ri.
На практике для того чтобы приблизить режим работы реального генератора ЭДС к режиму работы идеального, внутреннее сопротивление реального генератора Ri стараются делать как можно меньше, а сопротивление нагрузки Rн необходимо подключать величиной не менее чем в 10 раз большей величины внутреннего сопротивления генератора, т.е. необходимо выполнять условие: Rн >> Ri
Для того чтобы выходное напряжение реального генератора ЭДС не зависело от нагрузки, его стабилизируют применением специальных электронных схем стабилизации напряжения. Поскольку внутреннее сопротивление реального генератора ЭДС не может быть выполнено бесконечно малым, его минимизируют и выполняют стандартным для возможности согласованного подключения к нему потребителей энергии. В радиотехнике величины стандартного выходного сопротивления генераторов ЭДС составляют 50 Ом (промышленный стандарт) и 75 Ом (бытовой стандарт).
Например, все телевизионные приемники имеют входное сопротивление 75 Ом и подключены к антеннам коаксиальным кабелем именно такого волнового сопротивления. Для приближения к идеальным генераторам ЭДС источники питающего напряжения, используемые во всей промышленной и бытовой радиоэлектронной аппаратуре, выполняют с применением специальных электронных схем стабилизации выходного напряжения, которые позволяют выдерживать практически неизменное выходное напряжение источника питания в заданном диапазоне токов, потребляемых от источника ЭДС (иногда его называют источником напряжения).
На электрических схемах источники ЭДС изображаются так: Е — источник постоянной ЭДС, е(t) – источник гармонической (переменной) ЭДС в форме функции времени. Электродвижущая сила Е батареи последовательно соединенных одинаковых элементов равна электродвижущей силе одного элемента Е, умноженной на число элементов n батареи: Е = nЕ.
Электродвижущая сила (ЭДС) источника энергии
Для поддержания электрического тока в проводнике требуется внешний источник энергии, создающий все время разность потенциалов между концами этого проводника. Такие источники энергии получили название источников электрической энергии (или источников тока). Источники электрической энергии обладают определенной электродвижущей силой (сокращенно ЭДС), которая создает и длительное время поддерживает разность потенциалов между концами проводника.
Принцип действия и устройство генераторов постоянного тока
Генератор постоянного тока – это электротехническое оборудование, которое продуцирует напряжение постоянной величины. Устройство имеет довольно сложное техническое строение, которое можно назвать совершенством технической мысли.
- Принцип действия
- Характеристики и строение
- Электродвижущая сила
- Мощность оборудования и КПД
- Разновидности по способу возбуждения
- Область применения
Принцип действия
Генератор постоянного тока
Каждый проводник оснащен магнитом, к концам которого подключена нагрузка. При ее подключении по ним непрерывно протекает переменный ток. Природа его происхождения объясняется тем, что во время работы полюса магнита непрерывно меняются местами. На этом принципе основывается работа генератора переменного тока.
Чтобы ток не изменял своего направления, требуется успевать соединять точки коммутации нагрузки со скоростью аналогичной скорости вращения магнита. Справиться с поставленной задачей может только контроллер – небольшое электротехническое устройство, которое состоит из нескольких токопроводящих секторов, разделенных диэлектрическими пластинами. Оно фиксируется на якоре устройства и вращается с ним синхронно.
Электрическая энергия с якоря удаляется с помощью щеток. Используются чаще всего кусочки графита, обладающие высокой электропроводностью и низким коэффициентом трения.
Все эти процессы способствуют образованию на выходе электротехнической установки пульсирующего напряжения одной величины. Для сглаживания этой пульсации применяется несколько якорных обмоток. Чем их больше установлено, тем меньше будут броски напряжения на выходе.
Характеристики и строение
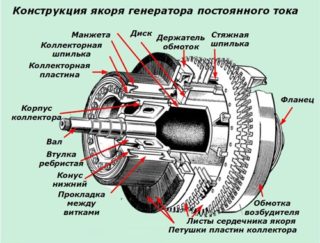
Как и абсолютное большинство других электрических агрегатов, генератор постоянного тока в свой состав включает статор и якорь.
Якорь изготавливают из стальных пластин с небольшими углублениями, в них помещаются обмотки. Их концы обязательно коммутируют с коллектором, который изготовлен из медных пластин, разделенных диэлектриками. По окончании сборки вал, якорь с обмотками и коллектор становятся одним целым.
Статор выполняет не только свою непосредственную функцию, но и является корпусом, к внутренней поверхности которого крепятся электрические магниты и постоянные. Предпочтительнее первый вариант, их сердечники могут быть набраны из металлических пластин или отлиты вместе с корпусом. Еще на корпусе предусмотрены специальные отверстия для крепления токосъемных щеток.
Количество графитов будет изменяться в зависимости от количества полюсов магнитов, которыми оснащен статор. Количество щеток равно количеству пар полюсов.
Электродвижущая сила
Электродвижущая сила генератора постоянного тока или ЭДС представляет собой величину, которая прямо пропорциональна потоку магнитов, количеству активных проводников и частоте вращения якоря. При уменьшении или увеличении этих показателей удается управлять величиной электродвижущей силы и напряжением. Установить требуемые параметры можно с помощью регулировки частоты вращения якоря.
Мощность оборудования и КПД
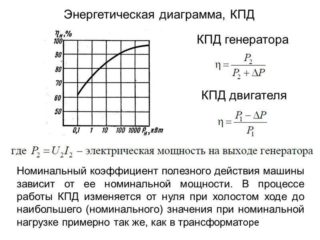
Мощность генератора постоянного тока встречается как полная, так и полезная. При постоянной электродвижущей силе генератора полная мощность пропорциональна силе тока.
Еще одной важной технической характеристикой альтернатора является его коэффициент полезного действия. Это понятие представляет собой отношение полезной мощности к полной.
На холостом ходе КПД равно нулю, максимальные показатели достигаются при номинальных нагрузках. В мощных инновационных моделях генераторов постоянного тока коэффициент полезного действия приближается к 90%.
Разновидности по способу возбуждения
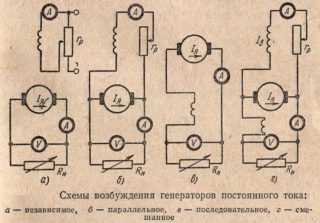
По способу возбуждения генераторы постоянного тока делятся на два вида:
- с самовозбуждением;
- с независимым возбуждением обмоток.
Для самовозбуждения оборудования обязательно требуется электричество, которое им же и вырабатывается. По принципу коммутации обмоток самовозбуждающиеся якоря альтернаторов делятся на следующие разновидности:
- оборудование с параллельным возбуждением;
- устройства с последовательным возбуждением;
- генераторы смешанного типа, которые получили название – компудные.
Каждая разновидность имеет свои конструктивные особенности, преимущества и недостатки.
Для обеспечения оптимальных условий для работы оборудования требуется наличие стабильного напряжения на зажимах. Особенность устройства заключается в параллельном возбуждении выводов катушки, которые подсоединены через регулировочный реостат, расположенный параллельно обмотке якоря.
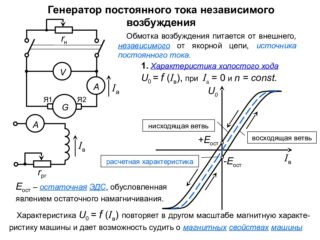
Для оборудования с независимым возбуждением источником питания выступают внешние устройства или аккумуляторные батареи. В маломощных модификациях устанавливаются постоянные магниты, обеспечивающие создание основного магнитного потока. Основное достоинство заключается в том, что на напряжение на зажимах не влияет возбуждающий ток.
Устройства со смешанным возбуждением сочетают положительные качества вышеописанных разновидностей. Конструктивные особенности – две катушки индуктивности, основная и вспомогательная. Цепь параллельной обмотки включает в себя реостат, который используется для регуляции силы тока возбуждения.
Область применения

Система постоянного тока в самолете
Генераторы постоянного тока имеют довольно обширный список применения. Его активно используют практически во всех отраслях промышленности, особенно в автомобилестроении и при сооружении российских локомотивов нового поколения, которые оснащают асинхронные двигатели, характеризующиеся работой на переменном токе.
Также электротехническое оборудование может использовать в быту для портативных сварочных аппаратов с автономной системой питания и для бытовой техники, оснащенной мощными пусковыми двигателями.
Перед покупкой следует проанализировать, с какими целями электротехническое оборудование должно будет справляться. Исходя из этого подбирается наиболее подходящая модификация генераторов постоянного тока.
Приобрести оборудование можно в специализированных магазинах или на интернет-площадках. При покупке важно проверить наличие всей необходимой сопроводительной документации и гарантийного талона. Предварительно также осматривается целостность корпуса и наличие повреждений: если таковые имеются, лучше воздержаться от покупки. При покупке через интернет стоит внимательно ознакомиться с отзывами о магазине на различных форумах.
Генератор постоянного тока ГПТ: основные понятия.

В процессе работы генератора постоянного тока в обмотке якоря индуцируется ЭДС Ea. При подключении к генератору нагрузки в цепи якоря возникает ток, а на выводах генератора устанавливается напряжение, определяемое уравнением напряжений для цепи якоря генератора:
сумма сопротивлений всех участков цепи якоря: обмотки якоря ra , обмотки добавочных полюсов rД , компенсационной обмотки rк.о., последовательной обмотки возбуждения и переходного щеточного контакта rщ.
При отсутствии в машине каких-либо из указанных обмоток в (28.2) не входят соответствующие слагаемые.
Якорь генератора приводится во вращение приводным двигателем, который создает на валу генератора вращающий момент М1 Если к генератору не подключена нагрузка (работает в режиме х.х. Ia=0 ), то для вращения его якоря нужен сравнительно небольшой момент холостого хода M0. Этот момент обусловлен тормозными моментами, возникающими в генераторе при его работе в режиме х.х.: моментами от сил трения и вихревых токов в якоре.
При работе генератора с подключенной нагрузкой в проводах обмотки якоря появляется ток, который, взаимодействуя с магнитным полем возбуждения, создает на якоре электромагнитный момент М. В генераторе этот момент направлен встречно вращающему моменту приводного двигателя ПД (рис. 28.1), т. е. он является нагрузочным (тормозящим).

Рис. 28.1. Моменты, действующие в генераторе постоянного тока
При неизменной частоте вращения n = const вращающий момент приводного двигателя M1 уравновешивается суммой противодействующих моментов: моментом х.х. M0 и электромагнитным моментом М, т. е.
Выражение (28.3) —называется уравнением моментов для генератора при постоянной частоте нагрузки. Умножив члены уравнения (28.3) на угловую скорость вращения якоря ω, получим уравнение мощностей:
 , (28.4)
, (28.4)
где P1 = M1ω — подводимая от приводного двигателя к генератору мощность (механическая); P0 = M0ω мощность х.х., т. е. мощность, подводимая к генератору в режиме х.х. (при отключенной нагрузке); PЭМ = Mω— электромагнитная мощность генератора.
Согласно (25.27), получим
или с учетом (28.1)
где P2 — полезная мощность генератора (электрическая), т. е. мощность, отдаваемая генератором нагрузке; PЭa — мощность потерь на нагрев обмоток и щеточного контакта в цепи якоря .
Учитывая потери на возбуждение генератора PЭВ, получим уравнение мощностей для генератора постоянного тока:
Следовательно, механическая мощность, развиваемая приводным двигателем P1, преобразуется в генераторе в полезную электрическую мощность P2, передаваемую нагрузке, и мощность, затрачиваемую на покрытие потерь
Так как генераторы обычно работают при неизменной частоте вращения, то их характеристики рассматривают при условии n = const.
Рассмотрим основные характеристики генераторов постоянного тока.
Характеристика холостого хода — зависимость напряжения на выходе генератора в режиме х.х. U0 от тока возбуждения IВ:
Нагрузочная характеристика — зависимость напряжения на выходе генератора U при работе с нагрузкой от тока возбуждения IВ:
Внешняя характеристика — зависимость напряжения на выходе генератора U от тока нагрузки I:
Регулировочная характеристика — зависимость тока возбуждения IВ от тока нагрузки I при неизменном напряжении на выходе генератора
Вид перечисленных характеристик определяет рабочие свойства генераторов постоянного тока которые во многом зависят от способа включения генератора в схему, поэтому мы рассмотрим каждый способ включения по отдельности.
Генератор постоянного тока.
Давайте разберем принцип действия генератора постоянного тока, познакомимся с его конструктивными особенностями и принципом действия.
Генератор постоянного тока работает основываясь на использовании закона электромагнитной индукции. Согласно этому закону, в проводнике, который движется в магнитном поле и пересекает магнитный поток, индуцируется ЭДС.
Магнитопровод по которому замыкается магнитный поток является одной из основных частей генератора постоянного тока.

Магнитная цепь генератора постоянного тока (изображен на рисунке 1) состоит из неподвижной части — статора (1) и вращающейся части — ротора (4).
Статор представляет собой стальной корпус, к которому присоединены остальные детали машины, в том числе магнитные полюсы (2). На магнитные полюсы насажена обмотка возбуждения (3), которая питается постоянным током и создает основной магнитный поток Ф0.
Магнитная цепь генератора постоянного тока с четырьмя полюсами.

Листы, из которых собирается магнитная цепь ротора: а — с открытыми пазами, б — с полузакрытыми пазами
Ротор машины собирают из штампованных стальных листов с пазами по окружности и с отверстиями, предназначенными для вала и вентиляции. Рабочая обмотка генератора постоянного тока вставляется в пазы ротора (5 на изображении 1). Этой обмоткой индуцируется ЭДС основным магнитным потоком. Обмотку также называют обмоткой якоря, поэтому ротор генератора постоянного тока принято называть якорем.
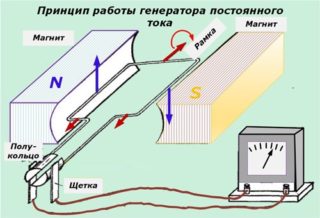
Значение ЭДС генератора постоянного тока может изменяться, но ее полярность остается величиной постоянной. Принцип действия генератора постоянного тока изображен на рисунке 3.
Магнитный поток создается полюсами постоянного магнита. Допустим, обмотка якоря состоит из одного витка, у которого концы присоединены к различным полукольцам, находящимся в изоляции друг от друга. Из этих полуколец формируется коллектор, совершающий вращения вместе с витком обмотки якоря. Одновременно с этим вдоль коллектора двигаются неподвижные щетки.
При вращении витка в магнитном поле в нем индуцируется ЭДС: e = B*l*v
- где В — магнитная индукция, l — длина проводника, v — его линейная скорость.
При совпадении плоскости витка с плоскостью осевой линии полюсов (при этом виток расположен вертикально), проводники пересекают максимальный магнитный поток. В это время в них индуцируется максимальный показатель ЭДС. В том случае когда виток принимает горизонтальное положение, ЭДС в проводниках равна нулю.
В проводнике направление ЭДС определяется по правилу правой руки (на рисунке 3 оно показано в виде стрелок). Когда при вращении витка проводник переходит под другой полюс, направление ЭДС в нем меняется на обратное. Но поскольку коллектор вращается вместе с витком, а щетки неподвижны, то к верхней щетке всегда присоединен проводник, который находится под северным полюсом, ЭДС которого направлена от щетки. В результате полярность щеток остается неизменной, а следовательно, остается неизменной по направлению ЭДС на щетках — е (рисунок 4).
Простейший генератор постоянного тока.

Изменение во времени ЭДС простейшего генератора постоянного тока.

Несмотря на то что ЭДС простейшего генератора постоянного тока постоянна в направлении, по своему значению она изменяется. Поскольку за один оборот витка ЭДС принимает 2 раза значение равное нулю и 2 раза максимальное. Для большинства приемников постоянного тока ЭДС с такой большой пульсацией непригодна и, строго говоря, ее нельзя назвать постоянной.
Чтобы уменьшить пульсацию, обмотку якоря генератора постоянного тока делают из большого числа витков (катушек), а коллектор из большого числа коллекторных пластин, которые изолированы друг от друга.

Для того чтобы рассмотреть подробнее процесс сглаживания пульсаций возьмем в качестве примера обмотку кольцевого якоря (рисунок 5). Она состоит из четырех катушек (1, 2, 3, 4), по два витка в каждой. Якорь двигается по направлению часовой стрелки с частотой n и в проводниках обмотки якоря, которые расположены на внешней стороне якоря, индуцируется ЭДС (направление движения указано стрелками).
Обмотка якоря представляет собой замкнутую цепь, которая состоит из последовательно соединенных витков. При этом обмотка якоря относительно щеток представляет собой две параллельные ветви. На рисунке 5а одна параллельная ветвь состоит из катушки 2, вторая из катушки 4 (в катушках 1 и 3 ЭДС не индуцируется, и они обеими концами соединены с одной щеткой). На рисунке 5б якорь изображен в положении, которое он занимает через 1/8 оборота. В этом положении одна параллельная ветвь обмотки якоря состоит из последовательно включенных катушек 1 и 2, а вторая из последовательно включенных катушек 3 и 4.
Схема простейшего генератора постоянного тока с кольцевым якорем.

При вращении якоря по отношению к щеткам каждая катушка имеет постоянную полярность.
На рисунке 6а показано как при вращении якоря изменяется ЭДС катушек во времени. ЭДС на щетках равна ЭДС каждой из параллельных ветвей обмотки якоря.
Из рисунка 5 видно, что ЭДС параллельной ветви равна или сумме ЭДС двух соседних катушек или ЭДС одной катушки:

Как результат этого, заметно уменьшаются пульсации ЭДС обмотки якоря (рисунок 6б). А значит увеличивая количество витков и коллекторных пластин можно получить практически постоянную ЭДС обмотки якоря.
Изменение во времени ЭДС катушек и обмотки кольцевого якоря.





