Форсировка возбуждения синхронного генератора это
ФОРСИРОВКА ВОЗБУЖДЕНИЯ СИНХРОННЫХ МАШИН
Для поддержания напряжения в аварийных режимах используют устройства форсировки возбуждения. Устройства обеспечивают быстрое повышение напряжения возбуждения до максимально возможного, называемого обычно потолочным значением  , при значительных снижениях напряжения, вызванных, главным образом, КЗ в электроэнергетической системе. Отношение этого напряжения или тока ротора соответственно к номинальному напряжению
, при значительных снижениях напряжения, вызванных, главным образом, КЗ в электроэнергетической системе. Отношение этого напряжения или тока ротора соответственно к номинальному напряжению  или току называют кратностью форсировки
или току называют кратностью форсировки  . Устройство форсировки возбуждения (УФВ) обычно входит в состав АРВ или выполняется отдельно. На рис. 8.33 приведена принципиальная схема релейного УФВ, состоящая из реле минимального напряжения PH, подключенного к трансформатору напряжения ТН и промежуточного реле РП. Уставка напряжения срабатывания реле минимального напряжения обычно составляет (0,8-0,85) U.
. Устройство форсировки возбуждения (УФВ) обычно входит в состав АРВ или выполняется отдельно. На рис. 8.33 приведена принципиальная схема релейного УФВ, состоящая из реле минимального напряжения PH, подключенного к трансформатору напряжения ТН и промежуточного реле РП. Уставка напряжения срабатывания реле минимального напряжения обычно составляет (0,8-0,85) U.
Устройство форсировки действует следующим образом. При снижении напряжения до уставки реле PH оно срабатывает и воздействует на обмотку промежуточного реле РП, которое своими контактами шунтирует реостат Р в цепи обмотки возбуждения возбудителя. При этом ток возбуждения возбудителя увеличивается до максимально возможного значения, а следовательно, и напряжение возбуждения на обмотке ротора синхронной машины нарастает сравнительно быстро до значения  по экспоненциальной зависимости
по экспоненциальной зависимости

где  — амплитуда изменения напряжения возбуждения;
— амплитуда изменения напряжения возбуждения;
 — постоянная времени системы возбуждения.
— постоянная времени системы возбуждения.
Если УФВ входит в состав АРВ, то при срабатывании реле PH на суммирующий усилитель АРВ подает такой сигнал, что независимо от величины и знаков сигналов на выходах других каналов регулирования обеспечивается быстрое повышение напряжения возбуждения до потолочного значения (рис. 8.34, а).
Поскольку к обмотке ротора синхронной машины прикладывается максимальное напряжение возбуждения, то ток в ее обмотке, а следовательно, и вынужденная ЭДС синхронной машины, увеличиваются с наибольшей скоростью (рис. 8.34, б).
Увеличение ЭДС синхронной машины при действии УФВ приводит к соответствующему увеличению амплитуды характеристики мощности увеличению амплитуды характеристики мощности в аварийном режиме
 Это позволяет уменьшить площадку ускорения на величину
Это позволяет уменьшить площадку ускорения на величину  увеличить площадку торможения на величину
увеличить площадку торможения на величину  , что приводит к повышению динамической устойчивости. При этом степень влияния форсировки возбуждения на динамическую устойчивость зависит от скорости и величины изменения напряжения возбуждения, которые определяются действием систем возбуждения и максимально возможным значением напряжения возбуждения. Как отмечалось ранее, постоянная времени
, что приводит к повышению динамической устойчивости. При этом степень влияния форсировки возбуждения на динамическую устойчивость зависит от скорости и величины изменения напряжения возбуждения, которые определяются действием систем возбуждения и максимально возможным значением напряжения возбуждения. Как отмечалось ранее, постоянная времени  электромашинной системы возбуждения равна 0,3-0,5 с, для тиристорной системы = 0,02-0,04 с. Однако следует иметь в виду, что для обеспечения высокой скорости увеличения ЭДС все системы возбуждения обязательно должны иметь высокий потолок возбуждения, так как для быстрого увеличения тока в роторе необходима не только высокая скорость изменения напряжения, но и его значение. Это вызвано тем обстоятельством, что ток возбуждения синхронной машины из-за наличия индуктивности обмотки ротора возрастает значительно медленнее, чем
электромашинной системы возбуждения равна 0,3-0,5 с, для тиристорной системы = 0,02-0,04 с. Однако следует иметь в виду, что для обеспечения высокой скорости увеличения ЭДС все системы возбуждения обязательно должны иметь высокий потолок возбуждения, так как для быстрого увеличения тока в роторе необходима не только высокая скорость изменения напряжения, но и его значение. Это вызвано тем обстоятельством, что ток возбуждения синхронной машины из-за наличия индуктивности обмотки ротора возрастает значительно медленнее, чем  Поэтому в аварийных режимах желательно повышение напряжения возбуждения до значения 4-5-кратного от номинального (высокий потолок возбуждения). На рис. 8.36 показана кривая изменения напряжения возбуждения на обмотке ротора синхронной машины при различных видах систем возбуждения.
Поэтому в аварийных режимах желательно повышение напряжения возбуждения до значения 4-5-кратного от номинального (высокий потолок возбуждения). На рис. 8.36 показана кривая изменения напряжения возбуждения на обмотке ротора синхронной машины при различных видах систем возбуждения.
Таким образом, быстродействие системы возбуждения и потолочное напряжение возбуждения при действии УФВ определяют значение тока в роторе, а следовательно, и степень изменения синхронной и переходной ЭДС в аварийном режиме. Величинами их изменения и определяется влияние форсировки возбуждения на характеристики мощности и в конечном итоге на динамическую устойчивость системы. Так, использование тиристорной системы возбуждения с постоянной времени = 0,04 с и kф = 4
 х.
х.
Рис. 8.35. Характеристики мощности в аварийном и послеаварийном режимах jVs j при отсутствии (/) и действии (2) форсировки возбуждения .
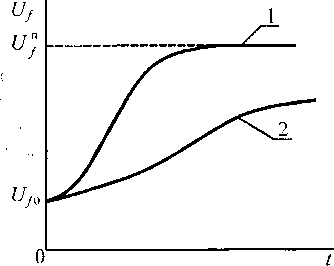
Рис. 8.36. Изменение напряжения возбуждения при различных системах возбуждения: 1 — тиристорная; 2 — электромашинная
вместо электромашинной системы с параметрами  = 0,5 с, kф = 4 приводит к увеличению динамической устойчивости на 15-20 %.
= 0,5 с, kф = 4 приводит к увеличению динамической устойчивости на 15-20 %.
Многолетний опыт эксплуатации УФВ показал, что они являются одним из эффективных средств повышения динамической устойчивости. Вместе с тем действие форсировки в ряде аварийных режимов не позволяет использовать все возможности систем возбуждения с АРВ по улучшению динамической устойчивости и повышению качества переходного электромеханического процесса в электроэнергетических системах

Механическое удерживание земляных масс: Механическое удерживание земляных масс на склоне обеспечивают контрфорсными сооружениями различных конструкций.

Поперечные профили набережных и береговой полосы: На городских территориях берегоукрепление проектируют с учетом технических и экономических требований, но особое значение придают эстетическим.


Папиллярные узоры пальцев рук — маркер спортивных способностей: дерматоглифические признаки формируются на 3-5 месяце беременности, не изменяются в течение жизни.
Форсировка возбуждения синхронного генератора это
СИСТЕМЫ ВОЗБУЖДЕНИЯ СИНХРОННЫХ МАШИН
Большинство синхронных машин имеет электромагнитное возбуждение. Источниками постоянного тока для обмоток возбуждения являются специальные системы возбуждения, к которым предъявляется ряд важных требований:
1) надежное и устойчивое регулирование тока возбуждения в любых режимах работы машины;
2) достаточное быстродействие, для чего применяется форсировка возбуждения, т. е. быстрое увеличение напряжения возбуждения до предельного значения, называемого потолочным. Форсировка возбуждения применяется для поддержания устойчивой работы машины во время аварий и в процессе ликвидации их последствий. Потолочное напряжение возбуждения выбирают не менее 1,8-2 номинального напряжения возбуждения. Скорость нарастания напряжения при форсировке возбуждения должна быть не менее 1,5-2 номинальных напряжений на контактных кольцах ротора в секунду;
3) быстрое гашение магнитного поля, т. е. уменьшение тока возбуждения машины до нуля без значительного повышения напряжения на ее обхмотках. Необходимость в гашении поля возникает при отключении генератора или повреждении в нем.
Для возбуждения синхронных машин применяется несколько систем. Простейшей из них является электромашинная система возбуждения с возбудителем постоянного тока (рис. 15). В этой системе в качестве источника используют специальный генератор постоянного тока GE, называемый возбудителем; он приводится во вращение от вала синхронного генератора, а его мощность составляет 1- 3 % мощности синхронного генератора. Ток возбуждения синхронной машины Iв относительно велик и составляет несколько сотен и даже тысяч ампер. Поэтому его регулируют с помощью реостатов, установленных в цепи возбуждения возбудителя. Возбуждение возбудителя осуществляют по схеме самовозбуждения (рис. 15) или независимого возбуждения от специального генератора постоянного тока GEA, называемого подвозбудителем (рис. 16). Подвозбудитель работает с самовозбуждением, и сопротивление резистора Rш2 при работе генератора не изменяется.


Для гашения магнитного поля применяют автомат гашения поля (АГП), который состоит из контакторов К1 и К2 и гасительного резистора Rp. Гашение поля проводится в следующем порядке. При включенном контакторе К1 включается контактор К2, замыкающий обмотку возбуждения на гасительный резистор, имеющий сопротивления rp≈5 rв, где rв — сопротивление обмотки возбуждения. Затем происходит размыкание контактора К1 и ток в цепи обмотки возбуждения генератора уменьшается (рис. 17).
Ток возбуждения можно было бы снизить до нуля отключением только одного контактора К1 без включения гасительного резистора. Ток возбуждения в этом случае исчез бы практически мгновенно. Но мгновенный разрыв цепи возбуждения недопустим, так как из-за большой индуктивности обмотки возбуждения Lв в ней индуктировалась бы большая ЭДС самоиндукции е= — Lв ∙ diв/dt, превышающая в несколько раз номинальное напряжение, в результате чего возможен пробой изоляции этой обмотки. Кроме того, в контакторе К1 при его отключении выделялась бы значительная энергия, запасенная в магнитном поле обмотки возбуждения, что могло бы вызвать разрушение контактора.

Форсировка возбуждения при использовании схем на рис. 15 и 16 осуществляется шунтированием резистора Rш1 включенного в цепь возбуждения возбудителя.
В последнее время вместо электромашинных систем получают все большее применение вентильные системы возбуждения с диодами и тиристорами. Эти системы возбуждения могут быть построены на большие мощности и являются более надежными, чем электромашинные.
Различают три разновидности вентильных систем возбуждения: систему с самовозбуждением, независимую систему возбуждения и бесщеточную систему возбуждения.
В вентильной системе с самовозбуждением (рис. 18) для возбуждения синхронной машины используется энергия, отбираемая от обмотки якоря основного генератора G, которая затем преобразуется статическим преобразователем ПУ в энергию постоянного тока. Эта энергия поступает в обмотку возбуждения. Начальное возбуждение генератора происходит за счет остаточного намагничивания его полюсов.

Разновидностью вентильной независимой системы возбуждения является бесщеточная система возбуждения. В этом случае на валу основной синхронной машины размещается якорь возбудителя переменного тока с трехфазной обмоткой. Переменное напряжение этой обмотки с помощью выпрямительного моста, закрепленного на валу машины, преобразуется в постоянное напряжение и непосредственно (без колец) подается на обмотку возбуждения основного генератора. Обмотка возбуждения возбудителя располагается на статоре и получает питание от независимого источника.
Что такое форсировка возбуждения электрических машин и как она осуществляется в генераторе (и двигателе) постоянного тока?
Одним из простых и эффективных способов обеспечения надежной работы синхронной машины при авариях является быстрое повышение ее тока возбуждения — форсировка возбуждения.
Форсировка возбуждения (ФВ) — быстрое повышение тока возбуждения для обеспечения надежной работы синхронной машины при авариях.
ФВ срабатывает, как правило, при снижении напряжения на выводах генератора до 90–80% от номинального. Это делается по нескольким причинам. С одной стороны, ФВ помогает поддержать напряжение в точках, удаленных от КЗ на более высоком уровне, а значит, сохранить в работе часть электроприемников, в том числе, может быть, жизненно важных для работы самой электростанции. С другой стороны, ФВ дает возможность повысить предел устойчивости генератора и тем самым сохранить его синхронную работу в электрической сети.
• Кратностью форсировки — отношением увеличенного потолочного значения тока возбуждения к номинальному (например, 2-кратное или 3-кратное),
• Быстродействием — скоростью нарастания тока (определяется величинами постоянной времени Те и потолка возбуждения.).
Чтобы представить физическую сущность форсировки, рассмотрим простейшую схему электромашинного возбудителя с самовозбуждением:

Рисунок 3 Простейшая схема электромашинного возбудителя с самовозбуждением
При снижении напряжения за установленный уровень (80–90%) Uн сигнал с выхода измерительного элемента (ИЭ) замыкает цепь контактора (К), который закорачивает реостат цепи возбуждения возбудителя. Это приводит к экспаненциальному нарастанию напряжения возбудителя, соответствующему росту тока if, Eqe, э.д.с. Eq и тока статора [2].
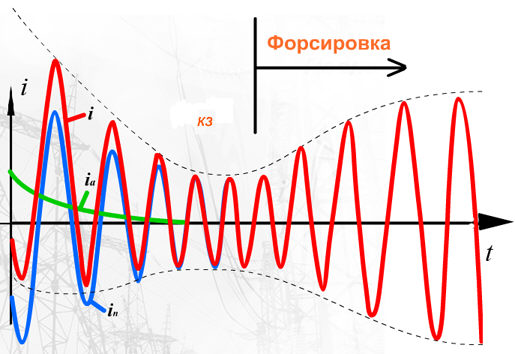
Рисунок 4 Графическая иллюстрация процесса форсировки возбуждения
Критерии выбора мощности электродвигателя?
Исходными данными для выбора типа и мощности электропривода являются конструктивные и технологические требования, необходимые для обеспечения надёжной и эффективной работы исполнительного механизма. При выборе мощности электродвигателя учитывается установленная мощность исполнительного механизма, потери мощности при определенном режиме работы, который определяет величину продолжительность включения ПВ (%). При определенных режимах работы используют различные методы выбора двигателя. Например, метод средних потерь, метод эквивалентного тока или метод эквивалентного момента при продолжительном режиме и др. [4].
Преимущества автоматического управления электроприводами перед ручным управлением?
В разомкнутых системах регулирования вследствие значительного перепада угловой скорости при изменении нагрузки на валу двигателя не удается получить большого диапазона регулирования угловой скорости и обеспечить высокую точность регулирования. В разомкнутой системе при заданном сигнале на входе (например, токе возбуждения двмгателя постоянного тока, питаемого от сети, или токе возбуждения генератора в системе Г-Д) выходная величина – угловая скорость определяется параметрами двигателя и нагрузкой на его валу, и ее изменение не компенсируется при различных возмущениях, которые практически всегда существуют.Поэтому в таких системах диапазон и точность регулирования угловой скорости не высоки. В разомкнутой системе также нельзя получить высокой точности поддержания момента, развиваемого приводом.тДля расширения диапазона регулирования и повышения точности используются замкнутые системы регулирования. Идея замкнутых систем регулирования сводится к тому, что в системе автоматически компенсируются воздействия возмущающих факторов и угловая скорость или момент двигателя могут с большей точностью поддерживаться на требуемом уровне [1].
Дата добавления: 2018-10-27 ; просмотров: 2779 ; Мы поможем в написании вашей работы!
Возбуждение синхронных генераторов




![]()
![]()
Обмотка ротора синхронного генератора питается постоянным током, который создает магнитный поток возбуждения. Обмотка ротора, источник постоянного тока, устройства регулирования и коммутации составляют систему возбуждения генератора.
Системы возбуждения должны:
· обеспечивать надежное питание обмотки ротора в нормальных и аварийных режимах;
· допускать регулирование напряжения возбуждения в достаточных пределах;
· обеспечивать быстродействующее регулирование возбуждения с высокими кратностями форсирования в аварийных режимах;
· осуществлять быстрое развозбуждение и в случае необходимости производить гашение поля в аварийных режимах.
Важнейшими характеристиками систем возбуждения являются: быстродействие, определяемое скоростью нарастания напряжения на обмотке ротора при форсировке
и отношение потолочного напряжения к номинальному напряжению возбуждения
так называемая кратность форсировки.
Согласно ГОСТ турбогенераторы должны иметь kф >2, а скорость нарастания возбуждения – не менее 2 с -1 . Кратность форсировки для гидрогенераторов должна быть не менее 1,8 для коллекторных возбудителей, соединенных с валом генератора, и не менее 2 для других систем возбуждения. Скорость нарастания напряжения возбуждения должна быть не менее 1,3 с -1 для гидрогенераторов мощностью до 4 MB А включительно и не менее 1,5 с -1 для гидрогенераторов больших мощностей [2.3].
Для мощных гидрогенераторов, работающих на дальние электропередачи, к системам возбуждения предъявляются более высокие требования: kф = 3 – 4, скорость нарастания возбуждения до 10 Uf номв секунду.
Обмотка ротора и системы возбуждения генераторов с косвенным охлаждением должны выдерживать двукратный по отношению к номинальному ток в течение 50 с. Для генераторов с непосредственным охлаждением обмоток ротора это время сокращается до 20 с, для генераторов мощностью 800–1000 МВт принято время 15 с, 1200 МВт — 10 с (ГОСТ 533-85Е).
В зависимости от источника питания системы возбуждения разделяются на системы н е з а в и с и м о г о возбуждения и самовозбуждения.
В системе независимого возбуждения на одном валу с генератором находится возбудитель – генератор постоянного или переменного тока. В системе самовозбуждения питание обмотки возбуждения осуществляется от выводов генератора через специальные понижающие трансформаторы и выпрямительные устройства.
Для генераторов мощностью до 100 МВт в качестве возбудителя применяется генератор постоянного тока GE, соединенный с валом генератора (рис. 2.9,а). Обмотка возбуждения возбудителя LGE питается от якоря возбудителя, ток в ней регулируется реостатом RR или автоматическим регулятором возбуждения АРВ. Ток, подаваемый в обмотку возбуждения LG синхронного генератора G, определяется величиной напряжения на возбудителе. Недостатком такой системы возбуждения является невысокая надежность работы генератора постоянного тока GE из-за вибрации и тяжелых условий коммутации при высокой частоте вращения 3000 об/мин. Другим недостатком является невысокая скорость нарастания возбуждения, особенно у гидрогенераторов (V= 1–2 с -1 ).

Рис. 2.9. Принципиальные схемы возбуждения генераторов:
а – независимое электромашинное возбуждение;
б – полупроводниковое самовозбуждение
В системе самовозбуждения (рис. 2.9,б)обмотка возбуждения генератора LG получает питание от трансформатора ТЕ, присоединенного к выводам генератора, через управляемые от АРВ вентили VS и от трансформаторов тока ТА через неуправляемые вентили VD. Ток вентилей VD пропорционален току статора, поэтому они обеспечивают форсировку возбуждения и работу генератора при нагрузке. Управляемые вентили VS подают ток, пропорциональный напряжению генератора, и обеспечивают регулирование напряжения в нормальном режиме. Такая система применяется для мощных синхронных машин.
Широкое распространение получила система возбуждения с машинным возбудителем 50 Гц и статическими выпрямителями (статическая тиристорная система независимого возбуждения – рис. 2.10). На одном валу с генератором Gнаходится вспомогательный синхронный генератор GE, который имеет на статоре трехфазную обмотку с отпайками, к которым присоединены две группы тиристоров: рабочая группа VD1 – на низкое напряжение возбудителя и форсировочная группа VD2 – на полное напряжение. Применение двух групп тиристоров обеспечивает потолок возбуждения до 4Uf номи высокое быстродействие (V=50 с 1 ). Обе группы соединяются параллельно по трехфазной мостовой схеме. На рис. 2.10 для упрощения чтения схемы показаны тиристоры только в одной фазе.

Система управления тиристорами AVD2 и AVD1 питается от трансформатора ТА1 и связана с АРВ (автоматическое регулирование возбуждения). Возбудитель GE имеет обмотку возбуждения LGE, получающую питание от трансформатора ТА2 через вентили VD. В рассмотренной схеме также показаны элементы схемы автоматического гашения магнитного поля (АГП): автомат АГП, резистор R, разрядник FVn контактор КМ.
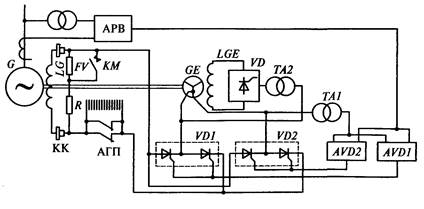
Рис. 2.10. Статическая тиристорная система независимого возбуждения
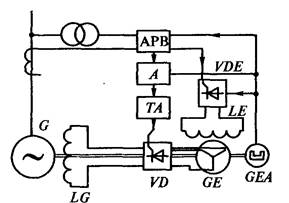
Рис. 2.11. Бесщеточная система возбуждения
К недостаткам схемы следует отнести наличие возбудителя переменного тока, который усложняет эксплуатацию, а также наличие скользящих контактов между неподвижными щетками, к которым присоединена система неподвижных тиристоров, и подвижными контактными кольцами КК, вращающимися на валу ротора.
Последний недостаток привел к разработке бесщеточной системы возбуждения (рис. 2.11). В качестве возбудителя GE в этой системе используется синхронный генератор 50 Гц, обмотка возбуждения которого LE расположена на неподвижном статоре, а трехфазная обмотка – на вращающемся роторе. Обмотка LE получает питание от подвозбудителя GEA через выпрямитель VDE.
На одном валу с возбудителем на специальных дисках укреплены тиристоры VD, которые выпрямляют переменный ток возбудителя и подают его в ротор генератора по жестким шинам без колец и щеток, так как ротор генератора, тиристоры VD и ротор возбудителя вращаются на одном валу с одинаковой скоростью.
Регулирование тока возбуждения осуществляется от АРВ путем воздействия на тиристоры через импульсное устройство Л и вращающийся трансформатор ТА.
Достоинством этой системы является отсутствие контактных колец и щеток, недостатком – необходимость останова генератора для переключения на резервное возбуждение или для замены тиристоров.
Бесщеточная система применяется для синхронных компенсаторов мощностью 50 MB-А и более и турбогенераторов мощностью 800 МВт и более.
Особенности алгоритма реализации системных функций в российских автоматических регуляторах возбуждения сильного действия
Надёжность и эффективность работы электроэнергетических систем (ЭЭС) в значительной мере определяется регулированием возбуждения входящих в неё синхронных генераторов и, в первую очередь, подсистем автоматических регуляторов возбуждения (АРВ), обеспечивающих максимальный уровень динамической устойчивости и эффективное демпфирование колебаний.


Следует заметить, что проблемой стабилизации режимов ЭЭС и разработкой унифицированного алгоритма системных стабилизаторов начали интенсивно заниматься в СССР в начале 50-х годов прошлого столетия, и окончательно завершили её в 80-е годы, когда полностью сформировалась идеология внешней и внутренней стабилизации, и появился сигнал производной тока возбуждения.
Этот период характеризуется быстрым развитием электроэнергетики страны. В то время были построены каскады крупных ГЭС, мощные тепловые и атомные станции. По географическим условиям мощные гидроэлектростанции строились вдали от крупных населённых пунктов и крупных промышленных предприятий. Возникла необходимость передавать большое количество электроэнергии на большое расстояние от электростанций к потребителям. Строительство параллельных линий для усиления электрической связи было дорогостоящим решением, поэтому было необходимо найти иные способы решения проблемы. Начала активно развиваться теория устойчивости электроэнергетических систем. В результате, первый в мире системный стабилизатор был разработан и внедрён практически в том виде, как он существует сейчас. СССР имел большую территорию и разветвлённую электроэнергетическую систему, обладавшую большим числом как слабых, так и сильных электрических связей между отдельными регионами.
На Западе начальный импульс в разработке системных стабилизаторов был дан в 70-х годах в Канаде из-за возникшей необходимости передавать мощность 500 МВт от АЭС Пикеринг и ГЭС в штате Онтарио по линиям электропередач протяженностью примерно 700 км и напряжением 500 кВ потребителям в США. Без быстродействующих систем возбуждения, оснащённых системными стабилизаторами, понадобились бы дополнительные линии. В Западной Европе эта проблема возникла ещё позднее – при вводе в эксплуатацию турбинных блоков мощностью более 300 МВт. В настоящий момент на Западе разработано около 10 типов системных стабилизаторов, описание которых приведено в стандарте IEEE Std 421.5.

Фото 1. Микропроцессорное производство для систем возбуждения синхронных генераторов
С учётом того, что отечественный стабилизатор успешно зарекомендовал себя в различных схемно-режимных ситуациях, было предложено рассмотреть вопрос о его включении в международные стандарты под названием PSS2RU. Для этого потребовалось предоставить его полное описание и привести результаты расчётов для того, чтобы оценить его эффективность по сравнению со стабилизаторами, включёнными в стандарт IEEE Std 421.5.
ОПИСАНИЕ СИСТЕМНОГО СТАБИЛИЗАТОРА PSS2RU
Задача любого системного стабилизатора – демпфирование электромеханических колебаний. Данные колебания лежат в диапазоне частот от 0,1 до 5 Гц. Эти колебания обусловлены качаниями роторов синхронных генераторов друг относительно друга. Полный взаимный угол между двумя машинами в любой схемно-режимной ситуации может быть разложен на две составляющие – внутренний и внешний угол. Внутренний угол – это угол между поперечной осью машины, совпадающей с вектором синхронной ЭДС Eq и вектором напряжения генератора Ug. Внешний угол – это угол между вектором напряжения генератора Ug и вектором синхронной ЭДС другой машины или центром электрических качаний синхронной машины (электростанции), работающей в сложной энергосистеме. Внутренний угол образуется в результате падения напряжения на внутреннем продольном индуктивном сопротивлении машины (Xd). Внешний угол образуется в результате падения напряжения на сопротивлениях внешних по отношению к рассматриваемому генератору элементов ЭЭС.

Фото 2. Для изготовления микроэлектроники на предприятиях концерна РУСЭЛПРОМ используется передовое высокоточное оборудование
Качания полного угла – результат совместного движения роторов и имеют двойственную природу:
- в режимах выдачи реактивной мощности – устойчивость определяется величиной и качаниями внешнего угла, который в тяжелых послеаварийных режимах или в «слабых» ЭЭС в этом случае может приближаться к 90 град. эл.;
- в режимах потребления реактивной мощности – устойчивость определяется величиной и качаниями внутреннего угла, который при уменьшении тока возбуждения генератора, работающего в ЭЭС любой мощности, может приближаться к 90 град. эл.
Таким образом, при одинаковых больших значениях полного угла физика переходных процессов и условия обеспечения апериодической и колебательной статической устойчивости существенно отличаются. Стабилизация режима, предлагаемая западными стандартами, не учитывает этого явления.
В результате аналитических и экспериментальных исследований и опыта эксплуатации синхронных генераторов выяснилось, что отклонениям внутреннего угла пропорциональна производная тока ротора. Отклонение частоты напряжения генератора ΔfU от установившегося значения и первая производная  генератора являются первой и второй производными внешнего угла соответственно. Таким образом, имеются два легко измеряемых параметра, каждый из которых способен осуществлять демпфирование соответствующей компоненты взаимного угла. Следовательно, входными параметрами рассматриваемого стабилизатора являются ток ротора (If) и частота напряжения генератора (fU).
генератора являются первой и второй производными внешнего угла соответственно. Таким образом, имеются два легко измеряемых параметра, каждый из которых способен осуществлять демпфирование соответствующей компоненты взаимного угла. Следовательно, входными параметрами рассматриваемого стабилизатора являются ток ротора (If) и частота напряжения генератора (fU).
Блок-схема системного стабилизатора PSS2RU показана на рисунке 1.
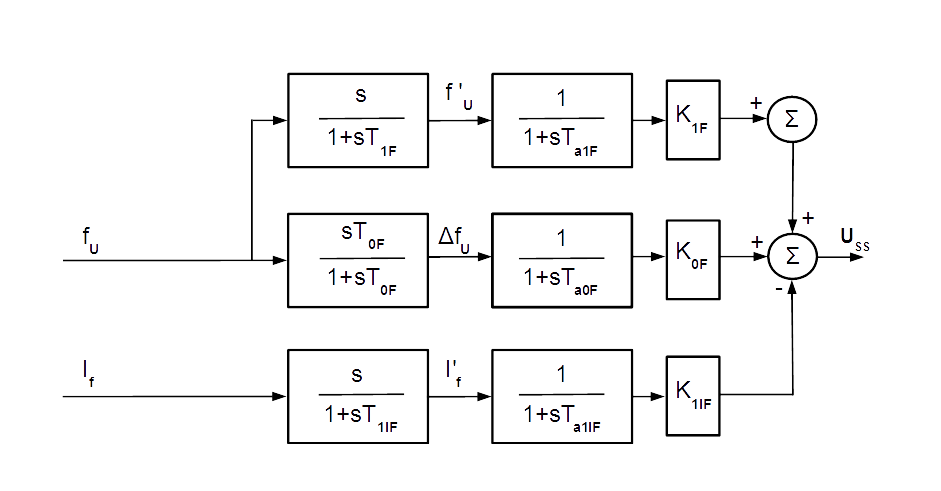
Стабилизатор состоит из 2-х каналов, соединённых параллельно. Выходные сигналы каждого канала суммируются на главном сумматоре. Просуммированный сигнал является выходным сигналом стабилизатора. Передаточные функции задают необходимую форму амлитудочастотной и фазочастотной характеристик каждого канала. Два канала перекрывают диапазон частот электромеханических колебаний. Канал по частоте настраивается на частотный диапазон от 0,3 до 1,2 Гц, канал по производной тока ротора настраивается на частотный диапазон от 1 до 3 Гц. Типовые значения постоянных времени приведены в таблице 1. Сравнительные испытания, проведенные НТЦ СО ЕЭС РФ, показали его высокую эффективность.
Таблица 1. Типовые значения параметров стабилизатора PSS2RU

РЕЛЕЙНАЯ ФОРСИРОВКА ВОЗБУЖДЕНИЯ
Совместно со стабилизатором PSS2RU применяется быстродействующая форсировка возбуждения. Её функцией является повышение динамической устойчивости при серьёзных повреждениях в энергосистеме, обусловленных снижением напряжения. Логика форсировки возбуждения изображена на рисунке 2.

При снижении напряжения ниже уставки срабатывания контроллер инициирует быстрое увеличение напряжения возбуждения до максимального значения до тех пор, пока напряжение статора генератора не повысится до уставки на снятие форсировки (0,8÷0,9) UГном. Включение форсировки происходит с минимальной выдержкой времени, а отключение с выдержкой времени от 0,2 до 0,3 секунд, что соответствует времени достижения максимального значения взаимного угла между роторами синхронных машин в послеаварийном режиме качаний. Форсировка также необходима для того, чтобы исключить на время протекания КЗ тракт регулирования из закона управления, так как резкие скачки токов, напряжений и частоты могут привести к снижению скорости нарастания напряжения возбуждения из-за противоположных воздействий от разных каналов регулирования.
Эффективность системного стабилизатора была проверена на математической модели 4-машинной энергосистемы (Схема Кундура), часто рассматриваемой в работах западных исследователей, в среде MATLAB/Simulink Sim Power Systems. Схема изображена на рисунке 3.

Модель представляет собой две области, каждая из которых содержит по 2 синхронных генератора. Области соединены между собой двумя линиями длиной 220 км. Режим установлен таким образом, что осуществляется передача 413 МВт из первой области во вторую.

Фото 3. Сборочный цех систем возбуждения и систем управления возбуждением синхронных генераторов
Тестовым возмущением является трёхфазное короткое замыкание в середине одной линии с последующим её отключением. Проведено сравнение PSS2RU со стабилизаторами, включёнными в стандарт IEEE Std 421.5. Стабилизаторы PSS1A и PSS4B имеют в качестве входного параметра скорость вращения ротора. В PSS1A сигнал скорости вращения последовательно проходит через фильтры и несколько фазосдвигающих звеньев. В PSS4B сигнал скорости вращения раздваивается и проходит в одном случае через датчик низких и средних частот, в другом – через датчик высоких частот. Далее сигналы проходят через фазосдвигающие звенья, которые выделяют низкие, средние и высокие частоты, после чего каждая компонента усиливается в зависимости от частоты. Полное описание PSS1A и PSS4B представлено в стандарте. Результаты представлены на рисунке 4.
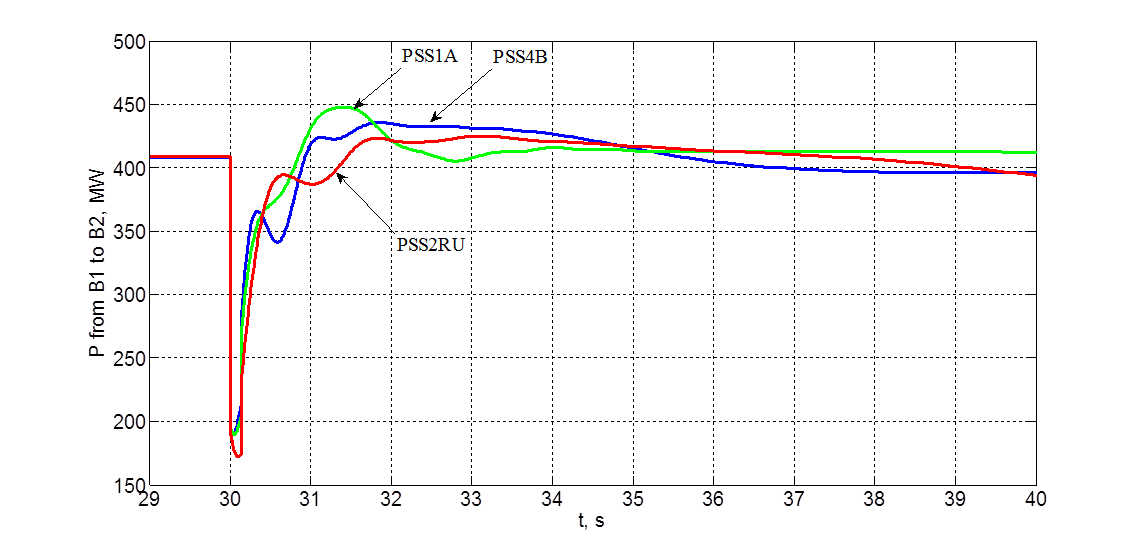
В энергосистеме ситуация, когда присутствует длинный транзит и создаются такие тяжёлые условия, является редкостью. Подобные условия могут возникнуть, если существует слабая связь или при неблагоприятных обстоятельствах при ремонтных схемах. Для того, чтобы убедиться в эффективности стабилизатора в различных условиях, выполним такое же тестовое возмущение, но при транзите длиной 10 км. Следует отметить, что при уменьшении длины транзита до 10 км. условия устойчивости энергосистемы улучшились, но такое же тестовое возмущение будет оказывать более сильную просадку напряжения на шинах генераторов, так как точка короткого замыкания стала находиться электрически ближе к каждому генератору. Результаты расчётов представлены на рисунке 5.
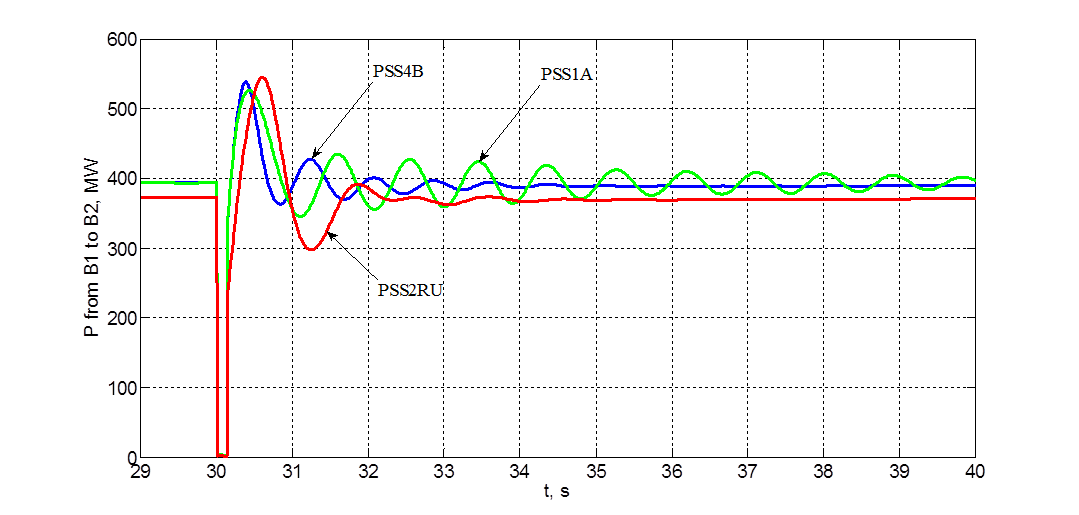
При совместном рассмотрении результатов расчёта на рисунках 4 и 5 можно сделать вывод, что стабилизатор PSS2RU при неизменной настройке осуществляет эффективное демпфирование колебаний как при длинном, так и при коротком транзите. При длинном транзите воздействуют все каналы стабилизатора, так как внутренний и внешний угол имеют одинаковый порядок величины. При коротком транзите внешний угол становится малым, поэтому даже при тех же самых настройках каналы по отклонению частоты и по производной частоты начинают вносить на порядок меньший вклад в суммарный сигнал системного стабилизатора по сравнению с каналом по производной тока ротора. Можно сказать, что при коротком транзите каналы стабилизатора по отклонению частоты и по производной частоты выключаются из работы, исходя из физической сущности процессов. Поэтому единая настройка оказывается достаточно эффективной в существенно различных условиях.
Фото 4. Все силовое оборудование, микропроцессорная аппаратура и программное обеспечение выпускаемой продукции разработаны в стенах НПП «РУСЭЛПРОМ-Электромаш»
ЗАКЛЮЧЕНИЕ
Мы отметили основные вехи истории создания, особенности структуры и функционирования Российского системного стабилизатора. Благодаря отмеченным выше свойствам, и своему широкому распространению на электростанциях России и ближайшего зарубежья, а также принимая во внимание простоту и грубость настройки своих параметров, системный стабилизатор PSS2RU должен занять значимое место в библиотеках основных программных продуктов для выполнения сетевых исследований. Для этого важно провести работу по интеграции структуры системного стабилизатора PSS2RU и алгоритма релейной форсировки – в документы международных организаций IEC и IEEE.

109029, Москва, Нижегородская ул., 32, стр.15
9. Форсировка возбуждения генератора электростанции. Требования к форсировке возбуждения.
Обмотки ротора СГ получают питание от источника постоянного тока, в качестве которого применяются устройства называемые возбудителями. Номинальные напряжения возбудителей 100-650 В, потребляемая мощность составляет 0,3-1% мощности генератора. Для совместной работы с возбудителем применяются вспомогательное и регулирующее оборудование, составляющее систему возбуждения. Регулированием тока возбуждения поддерживается заданное напряжение генератора, регулируется реактивная мощность, выдаваемая в сеть. При глубоком снижении напряжения генератора применяется форсировка возбуждения, что снижает качания генератора по частоте тока, сохраняет устойчивость параллельной работы генераторов станции. Форсировка возбуждения и регулирование обеспечивают надежную работу устройств РЗ и А и облегчают условия самозапуска электродвигателей собственных нужд подстанции.
К системам возбуждения применяются требования:
— необходимая кратность форсировки,
— обеспечить предельное возбуждение в аварийных случаях.
Быстродействие и кратность форсировки самые важные технические характеристики системы возбуждения генераторов.
Быстродействие — характеризует скорость нарастания напряжения на обмотке ротора при форсировке возбуждения в соответствии с выражением. Кратность форсировки есть отношение предельного напряжения возбуждения к номинальному возбуждению.
Для мощных гидрогенераторов, работающих на дальние электропередачи, к системам возбуждения предъявляются более высокие требования КФ.В=34, а скорость нарастания возбуждения до 10Uf.ном в секунду.
10.Системы возбуждения генераторов электростанций. Охарактеризовать и назвать достоинства и недостатки систем возбуждения.
Системы возбуждения делятся на две группы: независимое и самовозбуждение. Наибольшее распространение получило независимоевозбуждение, которое не зависит от режима работы генератора и имеет высокую надежность, наибольшее быстродействие по сравнению с другими системами и позволяют получить кратность форсировки возбуждения более КФ.В2.
На генераторах старого типа применяются генераторы постоянного тока с щеточным аппаратом, что снижает их надежность. Широкое распространение в настоящее время получили полупроводниковые преобразователи, в частности диодные и тиристорные. Подвод тока к обмотке возбуждения осуществляется бесщеточным путем, что повышает надежность. Системы с самовозбуждением имеют низкую надежность, в них работа возбудителя зависит от режима работы сети переменного тока. Особенно это сказывается при коротких замыканиях, когда практически невозможно выполнить форсировку напряжения.
11.Силовые трансформаторы. Назначение и классификация трансформаторов.
Силовой трансформатор — это статическое устройство для преобразования одного напряжения в другое. По числу преобразуемых фаз трансформаторы делятся: трехфазные и однофазные. Трехфазные применяются повсеместно, однофазные в тех случаях, когда ограничена мощность трехфазных и вместо одного трехфазного устанавливаются три однофазных по одному на фазу.
По числу обмоток трансформаторы делятся: двухобмоточные, двухобмоточные с расщеплением обмоток низкого напряжения, трехобмоточные, автотрансформаторы.
По материалу диэлектрика трансформаторы бывают масляные, сухие, заполненные негорючим диэлектриком, а также трансформаторы с литой изоляцией.
Двухобмоточные трансформаторы имеют два номинальных напряжения высшееUВН инизшее UНН. Они применяются как повышающие, так и как понижающие. Соответственно подстанции, на которых они устанавливаются, называют понизительные (понижающие) или повысительные (повышающие).
В двухобмоточных трансформаторах с расщеплением обмоток низкого напряжения, обмотка низкого напряжения разделена на две параллельные изолированные от земли. Применяются такие трансформаторы на станциях для подключения двух генераторов к одному трансформатору, на подстанциях собственных нужд, на подстанциях предприятий. На станциях их применение дает возможность создания крупных энергоблоков 200-1200 МВт, и упростить схему распределительных устройств на напряжениях 330-500 кВ.
На подстанциях предприятий их применяют для ограничения токов короткого замыкания, для раздельного питания резко переменной и спокойной нагрузки.
Трехобмоточные трансформаторы имеют три номинальных напряжения высшее UВН, среднее UСН инизшее UНН. Обмотки могут быть выполнены как на одну мощность, так и на разные мощности.
Автотрансформаторы также имеют три номинальных напряжения, но отличаются от трансформаторов наличием электрической и электромагнитной связей между обмотками, в отличие от трансформаторов, в которых присутствует только электромагнитная связь.
Силовые трансформаторы больших мощностей устанавливают на открытом воздухе и вместе с основным электрооборудованием образуют открытое распределительное устройство (ОРУ). При таком способе установке применяется принудительное охлаждение трансформаторов и высокий класс изоляции. Трансформаторы меньших мощностей применяются на предприятиях, устанавливают в помещениях, что позволяет значительно повысить их загрузку, использовать естественную вентиляцию, но условия охлаждения хуже, чем при установке на открытом воздухе.
Маркировка силовых трансформаторов буквенно-цифровая:
— вид электротехнического устройства А — автотрансформатор, без обозначения — трансформатор;
— число фаз, О — однофазный, Т — трехфазный;
— расщепленная обмотка низкого напряжения, Р;
— основные системы охлаждения описаны в п. 2.2.3;
— число обмоток, без обозначения — означает двухобмоточный, Т — трехобмоточный;
— наличие устройства регулирования напряжения — Н;
— исполнение бывает З. — защищенное, Г — грозоупорное, У — усовершенствованное, Л — с литой изоляцией;
— специфическая область применения, С — для систем собственных нужд электростанций, Ж — для электрификации железных дорог;
— цифрами после буквенной маркировки обозначается номинальная мощность в кВА;
— класс напряжения обмотки высокого напряжения, кВ;
Например, двухобмоточный трансформатор с маркировкой ТМН-4000/35-расшифровывается:
Т — трансформатор трехфазный,
М — с естественной циркуляций воздуха и масла;
Н — с устройством регулирования напряжения (РПН)





