Угловая характеристика синхронных генераторов
Угловые характеристики синхронного генератора
Регулирование активной мощности.
Рассмотрим особенности работы синхронного генератора параллельно с сетью очень большой мощности (Uc = const,/с = const).
Активная мощность синхронного генератора определяется известным соотношением

Электромагнитная мощность Рш больше полезной активной мощности Р на относительно малую мощность электрических потерь в обмотке статора.
Пренебрегая этими потерями, получим

Преобразуем формулу (4.6.2), выразив мощность Р через угол рассогласования 0. Для этого обратимся к векторной диаграмме синхронного генератора, работающего с активно-индуктивной нагрузкой (рис. 4.6.1).
Обозначим точками а и b концы векторов, а точкой с пересечение перпендикуляра, опущенного из точки а на вектор ?0. Угол Ьас равен углу i, а


Рис. 4.6.1. Векторная диаграмма синхронного генератора при активно-индуктивной нагрузке


Электромагнитный момент, создаваемый синхронной машиной  где Q, = 2ли|/60 — угловая скорость магнитного поля статора,
где Q, = 2ли|/60 — угловая скорость магнитного поля статора,

Поскольку Q, = const, то М
Р. Зависимости (4.6.3) или (4.6.4) представляют собой аналитическое выражение угловой характеристики синхронной машины (рис. 4.6.2).

Рис. 4.6.2. Угловые характеристики синхронного генератора
Активная мощность и электромагнитный момент синхронной машины пропорциональны ЭДС и синусу угла рассогласования 0, так как остальные параметры, входящие в формулы (4.6.3) и (4.6.4) — напряжение сети, угловая скорость, синхронное сопротивление, — практически постоянны.
Амплитуду электромагнитного момента Ммакс можно регулировать, так как она пропорциональна ЭДС Е0, зависящей от тока ротора (см. рис. 4.4.1).
Покажем на угловой характеристике синхронного генератора значение вращающего момента Мвр приводного двигателя (турбины) в виде горизонтальной прямой линии (момент турбины не зависит от угла 0). В точке пересечения этой прямой с угловой характеристикой (при угле рассогласования 0,) вращающий момент турбины равен электромагнитному моменту сопротивления генератора Мвр = М; механическая мощность турбины равна электромагнитной (активной) мощности генератора (см. формулу (4.6.2)). Следовательно, чем больше момент турбины, тем больше активная мощность генератора. При том же вращающем моменте турбины, но меньшем токе ротора угол рассогласования будет больше (0., > 0,). При заданных Е0 и U мощность синхронного генератора будет максимальна при 0 = 90°.
Таким образом, активная мощность генератора на электростанции регулируется моментом турбины или другого первичного двигателя и не зависит от сопротивления электрических приемников в сети. Диспетчер электростанции имеет суточно-почасовой (с учетом времени года) график нагрузки всех потребителей, где указана требуемая активная и реактивная мощность. По указанию диспетчера синхронные генераторы включаются, нагружаются (или разгружаются и отключаются) так, чтобы в любой момент обеспечивалась требуемая мощность электроэнергии.
Угловая характеристика. Статическая устойчивость работы генераторов при работе параллельно с сетью бесконечной мощности. V-образные характеристики генераторов
Принципиальной особенностью синхронного генератора, подключенного к сети постоянного напряжения и постоянной частоты, является способность автоматически (без участия операторов) поддерживать постоянной частоту вращения своего ротора. Мощность, отдаваемая генератором в сеть, будет определяться механическим моментом, развиваемым турбиной, вращающей ротор. В случае изменения этого механического момента, приводящего во вращение ротор, генератор без участия каких-либо внешних сил автоматически изменяет свой собственный электромагнитный момент, который противодействует вращению генератора. Сумма этих двух моментов становится равной нулю, и генератор продолжает вращаться с постоянной, синхронной скоростью. Состояние генератора с новым соотношением вращающего (от турбины) и тормозящего (внутреннего электромагнитного) моментов характеризуется так называемым углом нагрузки Θ (рис. 7.15).

Эта зависимость носит название угловой характеристики и представляет собой функцию тормозящего электромагнитного момента Мэм генератора (или электромагнитной мощности Pэм = МэмΩ1 где Ω1 — угловая скорость ротора) от внутреннего угла нагрузки Θ. Для турбогенераторов угловая характеристика очень близка к синусоиде. Рабочая точка, при которой функционирует генератор, обозначена индексом номинального режима Θ ном и Pэм.ном причем Θ ном выбирается таким, чтобы отношение максимума синусоиды Pэм.max к Pэм.ном было в пределах 1,5—1,8. Сама мощность Pэм.max и соответствующий ей максимальный момент Mэм.max — это максимально возможная мощность и максимально возможный тормозящий электромагнитный момент, развиваемые данным синхронным генератором.
В области углов Θ от 0 до 90 ° синхронный генератор способен самостоятельно поддерживать синхронное вращение. За пределами угла 90 ° он теряет эту способность и выпадает из синхронизма. Способность самосинхронизировать свое вращение характеризуется удельной синхронизирующей способностью Рс, которая дана на рис. 7.15 штриховой линией.
Важной для оценки статической устойчивости работы синхронных генераторов параллельно сети постоянной частоты f1 и напряжения U1, является семейство так называемых V-образных характеристик (иногда называемых U-образными характеристиками). Построенные для трех мощностей Р1 генератора, выраженных в относительной форме, они показаны на рис. 7.16 и представляют собой зависимость тока обмотки статора I1 от тока возбуждения обмотки ротора If, I1=f(If).
Минимумы токов 11 семейства V-образных характеристик лежат на кривой CD и представляют собой регулировочную характеристику рис. 7.16 при cos ф = 1.

В точках V-образных характеристик, лежащих слева от кривой CD, генератор недовозбужден и потребляет реактивную энергию из сети. В точках, лежащих справа от кривой CD, генератор перевозбужден и генерирует в сеть реактивную энергию. Кривая АВ является границей статической устойчивости, когда генератор «теряет» способность самостоятельно поддерживать синхронное вращение и выпадает из синхронизма. Следовательно, зона левее кривой АВ является неразрешенной для работы.
Аналогичное семейство V-образных кривых имеет место и для работы синхронной машины в режиме двигателя.
Синхронные двигатели
В § 7.1 отмечалось, что все традиционные виды электрических машин обладают свойством обратимости. Это означает, что любой электрический генератор без каких-либо переделок или изменений может работать как двигатель. Т.е. преобразовывать электрическую энергию в механическую, а любой электрический двигатель может выполнять функцию генерирования электрической энергии при подаче на его вал механической энергии.
Этот принцип основан на явлении индуктирования ЭДС в обмотках статоров машин переменного тока [в данном случае синхронных машин (СМ)] вне зависимости от режима, в котором они функционируют. При работе параллельно с сетью ток обмотки статора СМ определяется взаимодействием ЭДС обмотки статора и напряжения сети, к которой присоединена обмотка статора. Немного упрощая картину взаимодействия ЭДС машины и напряжения сети, можно утверждать, что поток активной мощности в генераторном режиме СМ идет от машины к сети, когда ЭДС больше напряжения. В двигательном режиме — наоборот, напряжение сети «перевешивает» ЭДС машины, определяя поток активной мощности от сети к машине.
Главной характеристикой синхронных двигателей (СД) является угловая характеристика, в точности повторяющая такую же характеристику синхронных генераторов (см. рис. 7.13). Отличие СД от синхронного генератора (СГ) состоит только в том, что электромагнитный момент Мэм, который был тормозящим у генератора, теперь является движущим, определяющим направление вращения ротора. Функцию тормозящего момента выполняет механическая нагрузка установки. Т.е. необходимая механическая работа (подъем груза, прокат металла, вентиляция, привод
насосов, компрессоров и т.п.). Частота вращения ротора СД, как у генераторов, работающих параллельно с сетью, определяется частотой напряжения сети.
Мощность СД редко превышает 20—30 МВт (машины типа ТДС), однако СМ для гидроаккумулирующих станций (ГАЭС), используемые как в режиме обычных генераторов, так и насосов, т.е. в двигательном режиме, достигают существенно больших по мощности уровней (десятков и даже сотен мегаватт).
Угловые характеристики синхронного генератора
Электромагнитная мощность неявнополюсного синхронного генератора при его параллельной работе с сетью
где θ — угол, на который продольная ось ротора смещена относительно продольной оси результирующего поля машины (рис. 21.4).
Электромагнитная мощность явнополюсного синхронного генератора
где xd=xad+x1 и xq= xad+x1 — синхронные индуктивные сопротивления явнополюсной синхронной машины по продольной и поперечной осям соответственно, Ом.
Разделив выражения (21.7) и (21.8) на синхронную частоту вращения ω1,получим выражения электромагнитных моментов:
неявнополюсной синхронной машины
явнополюсной синхронной машины
где М — элёктромагнитный момент, Н*м.
Анализ выражения (21.10) показывает, что электромагнитный момент явнополюсной машины имеет две составляющие: одна из них представляет собой основную составляющую электромагнитного момента
другая — реактивную составляющую момента
Основная составляющая электромагнитного момента Мосн явнополюсной синхронной машины зависит не только от напряжения сети (Мосн ≡ U1), но и от ЭДС Е0, наведенной магнитным потоком вращающегося ротора Ф в обмотке статора:
Это свидетельствует о том, что основная составляющая электромагнитного момента Мосн зависит от магнитного потока ротора: Мосн ≡ Ф. Отсюда следует, что в машине с невозбужденным ротором (Ф = 0) основная составляющая момента Мосн = 0.
Реактивная составляющая электромагнитного момента Мр не зависит от магнитного потока полюсов ротора. Для возникновения этой составляющей достаточно двух условий: во-первых, чтобы ротор машины имел явно выраженные полюсы (xq ≠ xd) и, во-вторых, чтобы к обмотке статора было подведено напряжение сети (Мр =U1 2 ). Подробнее физическая сущность реактивного момента будет изложена в § 23.2.
При увеличении нагрузки синхронного генератора, т. е. с ростом тока I1 происходит увеличение угла θ, что ведет к изменению электромагнитной мощности генератора и его электромагнитного момента. Зависимости Рэм = f(θ) и M = f(θ), представленные графически, называются, угловыми характеристиками синхронной машины.
Рассмотрим угловые характеристики электромагнитной мощности Рэм.я = f(θ) и электромагнитного момента Mя = f(θ) явно- полюсного синхронного генератора (рис. 21.5). Эти характеристики построены при условии постоянства напряжения сети (Uc = const) и магнитного потока возбуждения, т.е. E0= const. Из выражений (21.9) и (21.11) видим, что основная составляющая электромагнитного момента Мосн и соответствующая ей составляющая электромагнитной мощности изменяются пропорционально синусу угла θ (график 1), а реактивная составляющая момента Мр и соответствующая ей составляющая электромагнитной мощности изменяется пропорционально синусу угла 2θ (график 2). Зависимость результирующего момента Мя = Мосн + Мр и электромагнитной мощности Рэм от угла θ определяется графиком 3, полученным сложением значений моментов Mосн и Мр и соответствующих им мощностей по ординатам.
Максимальное значение электромагнитного момента Мmax соответствует критическому значению угла θкр.
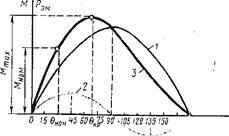
Рис. 21.5. Угловая характеристика синхронного генератора
Как видно из результирующей угловой характеристики (график 3), при увеличении нагрузки синхронной машины до значений, соответствующих углу θ≤θкр, синхронная машина работает устойчиво. Объясняется это тем, что при θ≤θкр рост нагрузки генератора (увеличение θ) сопровождается увеличением электромагнитного момента. В этом случае любой установившейся нагрузке соответствует равенство вращающего момента первичного двигателя М1 сумме противодействующих моментов, т.е. M1= Mя+ M0. В результате частота вращения ротора остается неизменной, равной синхронной частоте вращения.
При нагрузке, соответствующей углу θ≤θкр электромагнитный момент Мя уменьшается, что ведет к нарушению равенства вращающего и противодействующих моментов. При этом избыточная (неуравновешенная) часть вращающего момента первичного двигателя ΔМ = M1 — (Мя + M0) вызывает увеличение частоты вращения ротора, что ведет к нарушению условий синхронизации (машина выходит из синхронизма).
Электромагнитный момент, соответствующий критическому значению угла (θкр), является максимальным Мmах.
Для явнополюсных синхронных машин θкр = 60÷80 эл. град.
Угол θкр можно определить из формулы
cos θкр = √β 2 +0,5 – β (21.14)
У неявнополюсных синхронных машин Мр = 0, а поэтому угловая характеристика представляет собой синусоиду и угол θкр = 90°.
Отношение максимального электромагнитного момента Мmах к номинальному Мном называется перегрузочной способностью синхронной машины или коэффициентом статической перегружаемости:
Пренебрегая реактивной составляющей момента, можно записать
т. е. чем меньше угол θном, соответствующий номинальной нагрузке синхронной машины, тем больше ее перегрузочная способность. Например, у турбогенератора θном= 25÷30°, что соответствует λ = 2,35÷2,0.
Расчет нормального режима работы синхронного генератора. Схема замещения и расчет ее параметров. Выбор и проверка выключателей, страница 2
Электромагнитная мощность и момент, угловые характеристики синхронных генераторов
Поле якорной обмотки статора 1
имеет полюса
Nя
и
Sя
. Вращающееся вместе с ротором поле
2
обмотки возбуждения, имеет полюса
N
и
S.
В установившемся синхронном режиме поля обмотки якоря и обмотки возбуждениявращаются с синхронной скоростью
n1.
Полюсные системы обмоток якоря и обмотки возбуждения неподвижны относительно друг друга. Между ними происходит постоянное взаимодействие и возникает электромагнитная сила
F
, стремящаяся ориентировать ротор таким образом, чтобы поля обмоток якорной и возбуждения были направлены согласно.
Силы, возникающие при этом, можно моделировать, используя стремящиеся сократиться резиновые нити 3,
натянутые между разноименными полюсами систем якоря и обмотки возбуждения
.

Если машина не имеет нагрузки, то разноименные полюса систем якоря и обмотки возбужденияустанавливаются напротив друг друга по одной оси и электромагнитный момент отсутствует. Электромагнитная сила
F,
действующая между полюсами, имеет радиальное направление.
В генераторном режиме приводной двигатель или турбина создают вращающий момент на валу. Вал генератора вместе с полем ротора поворачивается и опережает поле якорной обмотки на угол Θ
. Вследствие этого электромагнитные силы
F
притяжения полей ротора и статора имеют тангенциальные составляющие
Fτ,
создающие тормозной электромагнитный момент. С увеличением нагрузки генератора угол
Θ
увеличивается, т. е. поле статора в большей степени отстает от поля ротора. При увеличении угла
Θ
в некоторых пределах увеличиваются
Fτ
и электромагнитный момент генератора. Максимум момента соответствует значению
Θ
= 90°, когда ось полюсов ротора расположена между осями полюсов суммарного потока.
Если машина переходит в двигательный режим, то на вал действует внешний момент, притормаживающий ротор. Вследствие этого вал двигателя вместе с полем ротора поворачивается и отстает от поля статора на угол Θ.
В этом случае тангенциальные составляющие электромагнитных сил меняют направление и возникает вращающий электромагнитный момент двигателя. Таким образом, при переходе из генераторного режима в двигательный установившаяся скорость вращения машины не меняется, а меняется знак угла
Θ.
В статоре синхронного генератора имеют место электрические потери в обмотке якоря Рэя
и потери в стали сердечника.
Электромагнитная мощность, передаваемая от ротора к статору электромагнитным полем равна:
В синхронных машинах большой и средней мощности потери в обмотке якоря Рэя
и потери в стали сердечника
Рс
малы по сравнению с электрической мощностьюотдаваемой генератором сеть. Если ими пренебречь, то электромагнитная мощность будет равна полезной мощности
Р2
, отдаваемой генератором в сеть:
Угловая характеристика генератора. Принцип регулирования реактивной мощности генератора.
Часто работу генератора удобно анализировать, если его активная и реактивная мощности выражены не через угол между векторами тока и напряжения φ
, а через угол
δ
— угол между вращаемым ротором и вращающимся магнитным полем статора. На векторной диаграмме генератора это будет угол между векторами фазной ЭДС возбуждения и соответствующим фазным напряжением.
Интересующие нас зависимости Р
и
Q
от
δ
получим на основе простейшей схемы замещения неявнополюсного турбогенератора, работающего на сеть (Рис.5.6а) и его векторной диаграммы (Рис.5.6б), построенной для одной фазы .При этом генератор будем представлять только его фазной ЭДС возбуждения
Ef
и индуктивным синхронным сопротивлением по продольной оси
Xd
, которым генератор характеризуется в установившихся режимах работы. В силу высокого КПД генератора активным сопротивлением статора в нашем случае пренебрежем.

Рис. 5.6.Схема замещения и векторная диаграмма турбогенератора, работающего на сеть.
Диаграмма на Рис.5.6б построена в предположении, что в обмотке статора протекает ток I
и вызывает в обмотке статора падение напряжения
Ixd,
а на зажимах генератора присутствует напряжение
U
.
Для активной мощности РФ
одной фазы можно записать:
Для реактивной мощности QФ
Для получения полной активной и реактивной мощностей генератора выражения (5.12) и (5.13) надо умножить на 3, по числу фаз. Для Р
получим ряд выражений:
– линейное напряжение на зажимах генератора.
Аналогично для полной реактивной мощности генератора Q
Зависимость (5.14) во всем диапазоне углов δ называется угловой характеристикой активной мощности синхронной машины и для неявнополюсной машины имеет вид синусоиды. Будем считать, что если Р>0
, т.е. при 0 0
, т.к. мы говорим о синхронном генераторе.

Рис.5.7. Зависимости Р=f(δ)
и
Q=f(δ)
для турбогенератора при заданных напряжении статора
U
и токе возбуждения
If
.
На рис.5.7 приведены зависимости P=f(δ)
и
Q=f(δ)
, здесь же показано, что к генератору поступает мощность от турбины
РТ
, представленная прямой линией, так как мощность турбины не зависит от угла
δ.
Как было рассмотрено ранее, активная мощность, отдаваемая генератором в сеть, без учета потерь в самом генераторе, должна равняться мощности поступающей от турбины. Из рис.5.7 видно, такое равенство может наступить в двух точках: а и b, которым соответствует два значения угла: δа и δb.
В какой из точек равновесия а или b может работать генератор, определяется таким понятием как статическая устойчивость.
Под статической устойчивостью понимают способность системы самостоятельно восстановить исходный режим работы при малом возмущении
При работе в точке а (рис. 5.7), мощности генератора и турбины уравновешивают друг друга. Если допустить, что угол δа получает небольшое приращение Δδ, то мощность генератора, следуя синусоидальной зависимости от угла, так же изменится на некоторую величину ΔР, причем, как вытекает из рис. 5.7, в точке а положительному приращению угла Δδ соответствует также положительное изменение мощности генератора ΔР. Что же касается мощности турбины, то она не зависит от угла δ и при любых изменениях последнего остается постоянной и равной РТ. В результате изменения мощности генератора равновесие моментов турбины и генератора оказывается нарушенным и на валу машины возникает избыточный момент тормозящего характера, поскольку тормозящий момент генератора в силу положительного изменения мощности ΔР преобладает над вращающим моментом турбины.
Под влиянием тормозящего момента ротор генератора начинает замедляться, что обусловливает перемещение связанного с ротором вектора ЭДС генератора Ef
в сторону уменьшения угла δ. В результате уменьшения угла вновь восстанавливается исходный режим работы в точке
a и, следовательно, этот режим должен быть признан устойчивым. К тому же выводу можно прийти и при отрицательном приращении угла Δδ в точке a.
Совершенно иной получается картина в точке b. Здесь положительное приращение угла Δδ сопровождается не положительным, а отрицательным изменением мощности генератора ΔP
. Изменение мощности генератора вызывает появление избыточного момента ускоряющего характера, под влиянием которого угол δ не уменьшается, а возрастает. С ростом угла мощность генератора продолжает падать, что обусловливает дальнейшее увеличение угла и т. д. Процесс сопровождается непрерывным перемещением вектора ЭДС
Ef
относительно вектора напряжения приемной системы
U
и генератор выпадает из синхронизма. Таким образом, режим работы в точке
b статически неустойчив и практически неосуществим.
Итак, точка а и любая другая точка на возрастающей части синусоидальной характеристики мощности отвечают статически устойчивым режимам и, наоборот, все точки падающей части характеристики — статически неустойчивым.
В области углов δ 
Откладываем вектор напряжения U1, под углом φ откладываем вектор тока I1.
Результирующий магнитный поток в синхронном генераторе это есть результат взаимодействия потока возбуждения и потока якоря Ф
Угловая характеристика синхронного генератора что это
Электромагнитная мощность и момент, угловые характеристики синхронных генераторов
Поле якорной обмотки статора 1
имеет полюса
Nя
и
Sя
. Вращающееся вместе с ротором поле
2
обмотки возбуждения, имеет полюса
N
и
S.
В установившемся синхронном режиме поля обмотки якоря и обмотки возбуждениявращаются с синхронной скоростью
n1.
Полюсные системы обмоток якоря и обмотки возбуждения неподвижны относительно друг друга. Между ними происходит постоянное взаимодействие и возникает электромагнитная сила
F
, стремящаяся ориентировать ротор таким образом, чтобы поля обмоток якорной и возбуждения были направлены согласно.
Силы, возникающие при этом, можно моделировать, используя стремящиеся сократиться резиновые нити 3,
натянутые между разноименными полюсами систем якоря и обмотки возбуждения
.

Если машина не имеет нагрузки, то разноименные полюса систем якоря и обмотки возбужденияустанавливаются напротив друг друга по одной оси и электромагнитный момент отсутствует. Электромагнитная сила
F,
действующая между полюсами, имеет радиальное направление.
В генераторном режиме приводной двигатель или турбина создают вращающий момент на валу. Вал генератора вместе с полем ротора поворачивается и опережает поле якорной обмотки на угол Θ
. Вследствие этого электромагнитные силы
F
притяжения полей ротора и статора имеют тангенциальные составляющие
Fτ,
создающие тормозной электромагнитный момент. С увеличением нагрузки генератора угол
Θ
увеличивается, т. е. поле статора в большей степени отстает от поля ротора. При увеличении угла
Θ
в некоторых пределах увеличиваются
Fτ
и электромагнитный момент генератора. Максимум момента соответствует значению
Θ
= 90°, когда ось полюсов ротора расположена между осями полюсов суммарного потока.
Если машина переходит в двигательный режим, то на вал действует внешний момент, притормаживающий ротор. Вследствие этого вал двигателя вместе с полем ротора поворачивается и отстает от поля статора на угол Θ.
В этом случае тангенциальные составляющие электромагнитных сил меняют направление и возникает вращающий электромагнитный момент двигателя. Таким образом, при переходе из генераторного режима в двигательный установившаяся скорость вращения машины не меняется, а меняется знак угла
Θ.
В статоре синхронного генератора имеют место электрические потери в обмотке якоря Рэя
и потери в стали сердечника.
Электромагнитная мощность, передаваемая от ротора к статору электромагнитным полем равна:
В синхронных машинах большой и средней мощности потери в обмотке якоря Рэя
и потери в стали сердечника
Рс
малы по сравнению с электрической мощностьюотдаваемой генератором сеть. Если ими пренебречь, то электромагнитная мощность будет равна полезной мощности
Р2
, отдаваемой генератором в сеть:
Что такое Косинус фи (cos φ) — «Коэффициент мощности»
Косинус фи (cos φ) это косинус угла между фазой напряжения и фазой тока. При активной нагрузке фаза напряжения совпадает с фазой тока, φ (между фазами) равен 0 (нулю). А как мы знаем cos0=1. То есть при активной нагрузке коэффициент мощности равен 1 или 100%.
Активная нагрузка

При емкостной или индуктивной нагрузке фаза тока не совпадает с фазой напряжения. Получается «сдвиг фаз». При индуктивной или активно-индуктивной нагрузке (с катушками: двигатели, дросселя, трансформаторы) фаза тока отстает от фазы напряжения. При емкостной нагрузке (конденсатор) фаза тока опережает фазу напряжения А почему тогда косинус фи (cos φ) это тоже самое что коэффициент мощности, да потому что S=U*I. Посмотрите на графики ниже. Здесь φ равно 90 косинус фи (cosφ)=0(нулю).
Мощности и моменты синхронного генератора (СГ).
Как известно, мощность синхронной машины (СМ) определяется соотношением:
При работе генератора под нагрузкой, его режим определяется следующими величинами:
1. напряжением в сети ( U);
2. собственной ЭДС генератора (Ео);
Помимо известной электрической, угол
имеет еще и, так называемую, конструктивную интерпретацию. А именно угол определяется угловым положением полюсов ротора относительно результирующего вращающегося магнитного потока статора. Итак, Р=f( U, Ео, ). Вместе с тем, когда генератор работает с сетью бесконечно большой мощности, то U=const, f=const. Кроме того, если синхронный генератор (СГ) работает в стационарном режиме, то его собственная ЭДС Ео=const. То есть мощность синхронного генератора (СГ) Р в этом наиболее распространенном случае зависит только от угла .
Получим общую формулу мощности синхронного генератора (СГ) для явнополюсного синхронного генератора (СГ) на основании его векторной упрощенной диаграммы при допущении, что Ra=0 ( r
Откуда можно выразить составляющие токи:
Путем проведения преобразований с учетом формул (20) и (21) можно получит в итоге общую формулу мощности для явнополюсного синхронного генератора (СГ):
Косинус фи (cos φ) — Коэффициент мощности
На шильдиках двигателей и некоторых других устройств можно видеть непонятный параметр косинус фи (cos φ). Что этот параметр означает, в данной статье коротко объясняется, что это такое. Косинус фи (cos φ) часто называют «Коэффициент мощности». Это почти одно и то же при правильной синусоидальной форме тока. Иногда для обозначения коэффициента мощности используется λ, эту величину выражают в процентах, или PF.
Условные обозначения
P — активная мощность S — полная мощность Q — реактивная мощность, U — напряжение I — ток.
§3 Электромагнитная мощность синхронной машины
П1 Упрощенная эквивалентная схема и векторная диаграмма неявнополюсного синхронного генератора
Как следует из энергетической диаграммы электромагнитная мощность синхронного генератора Р эм меньше его полезной мощности Р 2 на величину потерь в меди и стали статора. Но уже в машинах средней мощности эти потери составляют только около 1 процента номинальной мощности машины. На этом основании ими можно пренебречь и считать электромагнитную мощность машины равной ее полезной мощности . (1)
Такому упрощению соответствует эквивалентная схема без резистора r, учитывающего потери статора, и векторная диаграмма представленная на рисунке 19.
Упрощенная эквивалентная схема и векторная диаграмма явнополюсного СГ.
Кроме того, здесь индуктивные сопротивления учитывающие реакцию якоря х а и потоки рассеяния x s объединены в индуктивное сопротивление х с, называемое синхронным сопротивлением статорной обмотки. . (2)
На упрощенной векторной диаграмме угол
называют углом рассогласования полюсов ротора и результирующего поля машины.
П2 Электромагнитная мощность синхронной машины
Проведем из конца вектора Е 10 перпендикуляр аk на направление вектора U. Этот перпендикуляр с вектором jI 1x c образует угол . Отсюда следует, что . Или . Подставив это выражение в формулу мощности (1) имеем:
Вопросы для самоконтроля.
- Почему оказывается возможным считать электромагнитную мощность машины равной ее полезной мощности? (1)
- Что такое синхронное сопротивление статорной обмотки? (2)
- Как электромагнитная мощность синхронной машины связана с углом рассогласования полюсов? (3)
Векторная диаграмма неявнополюсного СГ
Начинают с того, что откладывают в пространстве первый вектор, относительно которого будет происходить построение — вектор напряжения. Его величина в масштабе будет равна номинальному напряжению генератора, а вот угол может быть любой. Для удобства зададим его так, чтобы вектор смотрел вертикально вверх.
Зная его положение, можно изобразить ток статора. Типично он отстает от вектора напряжения на угол и в масштабе также будет равен номинальному току машины.
Далее, если к вектору напряжения прибавить падение напряжения на внутреннем сопротивлении генератора xd
, то можно получить вектор э.д.с.
Eq
.
Построение выполняют так. Падение напряжения будет перпендикулярно току генератора, оператор j
при сопротивлении
xd
повернет его на 90 градусов против часовой стрелки. По этой причине через конец вектора напряжения проводят линию, перпендикулярную вектору тока генератора, и к концу вектора напряжения по этой линии откладывают величину, равную произведению
xd
на
I
.
Вектор, соединяющий начало координат и конец вектора падения напряжения, окажется э.д.с. Eq
. То, что эта э.д.с. имеет индекс
q
, означает, что она лежит на оси q машины. Пользуясь этим знанием, можно обозначить оси
q d
, а следовательно, и определить ориентацию ротора генератора в пространстве.
Переходная э.д.с. машины E’
лежит за сопротивлением
x’d
, а значит, используя те же соображения, можно отложить ее вектор на диаграмме. Проекция вектора E’ на ось q дает вектор
E’q
.
Сверхпереходная э.д.с. машины E
’’ лежит за сопротивлением
x’’d
. Его проекция на ось q даст
E’’q
.
Следует отметить, что векторную диаграмму можно построить, например, выбрав за исходный вектор напряжение системы. Тогда все сопротивления в расчетах необходимо увеличить на величину внешнего сопротивления (Xвн).
Комментарии и отзывы
Косинус фи (cos φ) — Коэффициент мощности : 23 комментария
Я у себя на даче подключил к сети ГИГАНТСКУЮ батарею конденсаторов из старых люминисцентных светильников и счётчик у меня практически не крутится. Реактивная нагрузка компенсирует активную (чайники, обогреватели, лампочки и т.п.). И никто не докапается, пломбы на счётчике не сорваны, незаконных подключений нет, а розетка – моя, что хочу, то туда и включаю. К сожалению, этот фокус не проходит с электронными счётчиками, которые повсеместно ставят в Москве.
mankubus – так какую- же ёмкость вы подключили к сети? (P.s у меня просто еще не эллектронный счетчик – вот и хочу поэксперементировать! ) Спасибо
расход электроэнергии зависит от емкости(микрофарат) конденсатора?
Графики перепутаны. На графике “Емкостная нагрузка” должно быть написано: “Индуктивная нагрузка”, и наоборот на графике “Индуктивная нагрузка” должно быть указано “Емкостная нагрузка”. Грамотеи, на весь рунет “прославились”.
у вас на графиках всё наоборот – если ток отстает от напряжения, то начало его периода по времени начинается на графике ПОЗЖЕ, это будет индуктивная нагрузка. У вас же на приведенных графиках при индуктивной нагрузке ток(красная синусоида) начинается раньше по времени, чем напряжение (синяя). Это неверно. Посмотрите хотя бы измерения по осциллографу и практические графики (не реклама, можете ссылку вырезать – https://myboot.ru/index.php?option=com_content&view=article&id=59&catid=34 – в самом низу страницы)
Тоже обратил на это внимание, читаешь, пытаешься вникнуть, а тут с графиками накосячили и сбивают с толку)
с графиками нет косяков.
Графики с косяком. Ёмкостной ток должен быть слева от напряжения, а индуктивный – справа, т. к. направление оси “Х” – слева направо. ———— Пример с асинхронным двигателем также неудачен. Если двигатель крутится в холостую – это вовсе не значит, что будет одна реактивная мощность. Как раз наоборот – реактивки почти не будет (впрочем, как и активной энергии). НЕГРУЗКИ НЕТ!
Померяйте напряжение и ток и помножьте их. Увидите, что мощность есть. В двигателе и в трансформаторе не может не быть активной на холостом ходу, т.к. есть сопротивление поводов.
Уважаемый prospero графики верны. это связанно не с направлением оси Х, а с тем что ток в отличии от напряжения в катушке не может мгновенно достичь своего максимального значения, а для конденсаторов наоборот напряжение возрастает с убыванием тока. И ЭТО ЗАКОН. А графики ещё нужно уметь читать…
Графики не верны. Изучайте ТОЭ.
Мы анализируем не ток в катушке или напряжение в емкости, при подаче переменного напряжения, а строим графики тока и напряжения нагрузки чисто индуктивной (сдвиг по фазе напряжения и тока на 90 эл. гр. – ток отстает от напряжения на 90 эл. гр.) и при чисто емкостной нагрузке – напряжение отстает от тока на 90 эл. гр.
подскажите откуда в формуле расчета мощности берется корень из 3?
Павел, Наверное потому что 3 фазы, если 220 умножить на корень из 3 получится 380
полная мощность S = 3Uф x Iф = 1,73 x Uл x Iл = 3Uф x Iф =3 x Uл/1,73 x Iл В симметричной 3-х фазной системе Iл = Iф, Uф = Uл/1,73 Корень из 3 = 1,7320508, примерно 1,73 Линейное напряжение больше фазного в 1,73 раза. Смотрите ТОЭ, раздел “Трехфазный переменный ток” в любом учебнике электротехники.
в примере сказано,что про токе 1 и напряжению 0 мощности нет. позвольте,но это к.з.
1*0=0, мощности нет, работы тоже, какое КЗ?
Но ведь при КЗ ток = 1, а напряжение = 0, что не так?
Ох-ох-хо. Книга есть. Автор Бессонов. ТОЭ называется. Очень доходчиво написано про электричество. Читайте, приобретайте знания. Зачем здесь смешить.
Угловая характеристика генератора. Принцип регулирования реактивной мощности генератора.
угловые характеристики синхронного генератора

При увеличении нагрузки на синхронный генератор, т. е. с увеличением тока 1и происходит увеличение утла рассогласования 0 между вектором МДС ротора и вектором МДС статора. С ростом этого утла изменяются как активная мощность на выходе генератора, так и его электромагнитный момент. Зависимость этих величин от угла 0 выражается угловыми характеристиками синхронной машины.
Рассмотрим угловые характеристики мощности Рэм =/(©) и момента М=/(&) явнополюсной синхронной машины (рис. 13.1). Указанные характеристики построены при условии Uj = const и Е0 = const. Из выражений (9.2) и (9.4) видно, что основная составляющая момента Мжн и соответствующая ей составляющая электромагнитной мощности изменяются пропорционально синусу утла 0 (кривая /), а реактивная составляющая момента Мр и соответствующая ей составляющая электромагнитной мощности изменяются пропорционально синусу 20 (кривая 2). График зависимости момента М и мощности Рэм (кривая 3) получается в результате сложения значений моментов Мое» и Мр и соответствующих мощностей по ординатам. Как следует из угловой характеристики (кривая 3), при увеличении нагрузки синхронной машины до значений, при которых угол 0 ®кр, электромагнитный момент М уменьшается, что ведет к нарушению равенства вращающего и противодействующих моментов. При этом избыточная (неуравновешенная) .часть вращающего момента первичного двигателя AM = М1-(М+ М0) вызывает увеличение частоты вращения ротора, что ведет к нарушению условий синхронизации (машина выходит из синхронизма).
Электромагнитный момент, соответствующий критическому значению угла (®кр), является максимальным Ммакс,
Для явнополюсных синхронных машин ®кр- 6080 эл. град.
Угол ©^ можно определить по формуле [5]
У неявнополюсных синхронных машин угловая характеристика представляет собой синусоиду, а поэтому величина угла ©^ = 90°.
Отношение максимального электромагнитного момента Ммшс к номинальному Мном называется перегрузочной способностью синхронной машины, или коэффициентом статической перегружаемости:
Ммакс/Мном = 1,4^3. (13.2) Пренебрегая реактивной составляющей момента, можно записать
^«l/sin©WJ1 Читайте также: Дистанционное управление электродвигателем, нагревателем или вентилятором

Рис. 5.6.Схема замещения и векторная диаграмма турбогенератора, работающего на сеть.
Диаграмма на Рис.5.6б построена в предположении, что в обмотке статора протекает ток I
и вызывает в обмотке статора падение напряжения
Ixd,
а на зажимах генератора присутствует напряжение
U
.
Для активной мощности РФ
одной фазы можно записать:
Для реактивной мощности QФ
Для получения полной активной и реактивной мощностей генератора выражения (5.12) и (5.13) надо умножить на 3, по числу фаз. Для Р
получим ряд выражений:
– линейное напряжение на зажимах генератора.
Аналогично для полной реактивной мощности генератора Q
Зависимость (5.14) во всем диапазоне углов δ называется угловой характеристикой активной мощности синхронной машины и для неявнополюсной машины имеет вид синусоиды. Будем считать, что если Р>0
, т.е. при 0 0
, т.к. мы говорим о синхронном генераторе.

Рис.5.7. Зависимости Р=f(δ)
и
Q=f(δ)
для турбогенератора при заданных напряжении статора
U
и токе возбуждения
If
.
На рис.5.7 приведены зависимости P=f(δ)
и
Q=f(δ)
, здесь же показано, что к генератору поступает мощность от турбины
РТ
, представленная прямой линией, так как мощность турбины не зависит от угла
δ.
Как было рассмотрено ранее, активная мощность, отдаваемая генератором в сеть, без учета потерь в самом генераторе, должна равняться мощности поступающей от турбины. Из рис.5.7 видно, такое равенство может наступить в двух точках: а и b, которым соответствует два значения угла: δа и δb.
В какой из точек равновесия а или b может работать генератор, определяется таким понятием как статическая устойчивость.
Под статической устойчивостью понимают способность системы самостоятельно восстановить исходный режим работы при малом возмущении
При работе в точке а (рис. 5.7), мощности генератора и турбины уравновешивают друг друга. Если допустить, что угол δа получает небольшое приращение Δδ, то мощность генератора, следуя синусоидальной зависимости от угла, так же изменится на некоторую величину ΔР, причем, как вытекает из рис. 5.7, в точке а положительному приращению угла Δδ соответствует также положительное изменение мощности генератора ΔР. Что же касается мощности турбины, то она не зависит от угла δ и при любых изменениях последнего остается постоянной и равной РТ. В результате изменения мощности генератора равновесие моментов турбины и генератора оказывается нарушенным и на валу машины возникает избыточный момент тормозящего характера, поскольку тормозящий момент генератора в силу положительного изменения мощности ΔР преобладает над вращающим моментом турбины.
Под влиянием тормозящего момента ротор генератора начинает замедляться, что обусловливает перемещение связанного с ротором вектора ЭДС генератора Ef
в сторону уменьшения угла δ. В результате уменьшения угла вновь восстанавливается исходный режим работы в точке
a и, следовательно, этот режим должен быть признан устойчивым. К тому же выводу можно прийти и при отрицательном приращении угла Δδ в точке a.
Совершенно иной получается картина в точке b. Здесь положительное приращение угла Δδ сопровождается не положительным, а отрицательным изменением мощности генератора ΔP
. Изменение мощности генератора вызывает появление избыточного момента ускоряющего характера, под влиянием которого угол δ не уменьшается, а возрастает. С ростом угла мощность генератора продолжает падать, что обусловливает дальнейшее увеличение угла и т. д. Процесс сопровождается непрерывным перемещением вектора ЭДС
Ef
относительно вектора напряжения приемной системы
U
и генератор выпадает из синхронизма. Таким образом, режим работы в точке
b статически неустойчив и практически неосуществим.
Итак, точка а и любая другая точка на возрастающей части синусоидальной характеристики мощности отвечают статически устойчивым режимам и, наоборот, все точки падающей части характеристики — статически неустойчивым.
В области углов δ 
Как было указано выше, если машина работает в режиме генератора, то под действием момента турбины Мт угол θ (угол между осью индуктора и осью результирующего потока Фδ) возрастает. Электромагнитный момент – тормозной. Ось индуктора опережает ось потока Фδ, и угол θ считается положительным. Если разгрузить генератор до θ=0, то напряжение генератора уравновешено ЭДС генератора и ток статора I=0. Если теперь нагрузить машину внешней нагрузкой, то машина перейдет в двигательный режим. При этом, электромагнитный момент будет движущим, а момент тормозной Мв – момент на валу. Как видим из рис. 40 при двигательном режиме результирующий поток Фδ будет тянуть за собой индуктор. Угол θ будет отрицательным. Двигатель будет работать устойчиво в диапазоне угла θ=0-90 0 .
Уравнения электромагнитной мощности и момента неявнополюсного синхронного двигателя запишутся:
Работа синхронного двигателя в режиме угловых характеристик соответствует режиму: iB=const, M=var.
| | | следующая лекция ==> | |
| Режимы работы синхронной машины параллельно с сетью | | | Режим работы синхронного двигателя при постоянном моменте и переменном токе возбуждения |
Дата добавления: 2019-07-26 ; ; ЗАКАЗАТЬ НАПИСАНИЕ РАБОТЫ
Фaq – поток реакции якоря по поперечной оси;
Фad – поток реакции якоря по продольной оси;
ФGf – поток рассеяния обмотки возбуждения;
Фf – полный поток обмотки возбуждения;
Фd- полезный поток.
Полный поток обмотки возбуждения Фf, создаваемый протекающим в ней током, состоит из потока рассеяния обмотки возбуждения, сцепленной только с обмоткой возбуждения не проникающей в статор машины ФGf, и полезного потока, который проникает в статор, пересекая воздушный зазор Фd. Полезный поток будет сцеплен с обмоткой статора и вращаясь вместе с ротором наводит в ней ЭДС, которая отстает на 90° и называется ЭДС холостого хода Еq. При включении обмотки статора на нагрузку в ней будет протекать ток I и в зависимости от характера он будет иметь опережающий или отстающий характер. Обычно нагрузка активно-индуктивная, то ток отстает на от Еq. При протекании тока I создаются собственные магнитные поля, называемые потоками реакции якоря, которые оказывают значительное влияние на характеристики СГ во всех его режимах работы под нагрузкой.
При явнополюсном исполнении генератор имеет магнитную нессиметрию по продольной и поперечной осям, так как воздушный зазор по этим осям различен.
При любом исполнении (явнополюсном и неявнополюсном) имеется электрическая нессиметрия ротора, т.к. обмотка располагается только по продольной оси «d» и сцепляется только с потоком якоря, действующим по этой же оси.
Из-за нессиметрии генератора расчет потоков реакции якоря и их влияние на переходной процесс сложен, поэтому Блондель предложил учитывать реакцию по двум осям (метод двух реакций).
Метод двух реакций основан на принципе наложения, при котором предполагается, что магнитные потоки, действующие по поперечной оси не влияют на величину потоков, действующих по продольной оси и наоборот. На практике имеет место насыщение участков в магнитной цепи синхронной машины, то такое предположение вносит в расчет определенную погрешность, которая может быть уменьшена введение соответствующих корректив в результаты расчета, тем самым, упрощая расчеты.





