Что такое статическая устойчивость синхронного генератора
Статическая устойчивость синхронного генератора
Статическая устойчивость синхронной машины, работающей параллельно с сетью, — это способность сохранять синхронное вращение (n2=n1) при изменении внешнего вращающего или тормозного момента Мвн, приложенного к ее валу. Статическая устойчивость обеспечивается только при углах q 0 (точка С), то увеличение угла q при возрастании Мвн вызывает уменьшение электромагнитного момента до значения (М — ΔМ) (точка D). Равновесие моментов, действующих на вал ротора, нарушается. Ротор продолжает ускоряться, а угол q — возрастать, что может привести к двум результатам:
1) машина переходит в точку устойчивой работы (аналогичную точке А) на последующих положительных полуволнах угловой характеристики;
2) ротор по инерции проскакивает устойчивые положения, при этом происходит выпадение из синхронизма, т. е. ротор начинает вращаться с частотой, отличающейся от частоты вращения магнитного поля статора.
Выпадение, из синхронизма является аварийным режимом. При этом ток якоря возрастает, так как ЭДС генератора Е и напряжение сети Uc в этом режиме могут складываться по контуру «генератор — сеть», а не вычитаться, как при нормальной работе.
Если внешний момент при работе машины в точке С снижается, то угол q уменьшается, электромагнитный момент возрастает, что приводит к дальнейшему уменьшению угла q и переходу к работе в устойчивой точке А.
Если машина работает в установившемся режиме при некотором угле q, то малое отклонение Δq от этого угла сопровождается возникновением момента ΔМ = (dM/dq) Δq


 который стремится восстановить исходный угол q. Этот момент называют синхронизирующим. Ему соответствует понятие синхронизирующей мощности ΔРЭМ = (dРЭМ/dq) Δq.
который стремится восстановить исходный угол q. Этот момент называют синхронизирующим. Ему соответствует понятие синхронизирующей мощности ΔРЭМ = (dРЭМ/dq) Δq.
Производные dM/dq и dРЭМ/dq называют соответственно удельным синхронизирующим моментом и удельной синхронизирующей мощностью.
Удельный синхронизирующий момент имеет максимальное значение при q = 0. С возрастанием q он уменьшается, а при q = qкр он равняется нулю, поэтому синхронные машины обычно работают с q = 20-30°, что соответствует приблизительно двукратному запасу по моменту.
Перегрузочная способность синхронной машины оценивается отношением:
Согласно ГОСТу это отношение для мощных генераторов должно быть не менее 1,6—1,7, а для синхронных двигателей большой и средней мощности — не менее 1,65.
Для неявнополюсной машины удельный синхронизирующий момент и мощность:
dM/dq = Mmax cosq ; dРЭМ/dq = РЭМ max cosq.
Удельная синхронизирующая мощность и момент обратно пропорциональны индуктивному сопротивлению Х1 или Хd. Для устойчивой работы индуктивное сопротивление машины должно быть возможно наименьшим, для чего необходимо увеличить воздушный зазор. При этом требуется увеличение МДС возбуждения, что ведет к удорожанию машины.
Поэтому в современных синхронных машинах для повышения устойчивости применяют автоматическое регулирование тока возбуждения при изменении нагрузки. При увеличении тока возбуждения возрастает ЭДС Еf и момент Mmax. При этом увеличивается устойчивость машины.
 |
При работе на электрическую сеть синхронные генераторы должны работать с перевозбуждением, обеспечивающим повышение перегрузочной способности. При номинальном режиме ток I1 должен отставать от напряжения U1 и иметь cosφ1= 0,8.
Генераторы большой мощности снабжают регуляторами возбуждения сильного действия, которые реагируют не только на отклонение напряжения U1, но и на производные во времени dU1/dt и dI1/dt, последняя из которых определяется изменениями угла dq/dt.
 В машинах малой и средней мощности применяют системы фазового компаундирования, обеспечивающие автоматическое изменение тока возбуждения при изменении тока нагрузки. Обмотка возбуждения 2 питается от обмотки якоря 1 через полупроводниковый выпрямитель 6. К входу выпрямителя параллельно подключены вторичные обмотки двух трансформаторов 3 и 5. Их первичные обмотки включены параллельно и последовательно с обмоткой якоря 1. Последовательно с вторичной обмоткой трансформатора 3 включен реактор 4.
В машинах малой и средней мощности применяют системы фазового компаундирования, обеспечивающие автоматическое изменение тока возбуждения при изменении тока нагрузки. Обмотка возбуждения 2 питается от обмотки якоря 1 через полупроводниковый выпрямитель 6. К входу выпрямителя параллельно подключены вторичные обмотки двух трансформаторов 3 и 5. Их первичные обмотки включены параллельно и последовательно с обмоткой якоря 1. Последовательно с вторичной обмоткой трансформатора 3 включен реактор 4.
Для удержания синхронной машины в синхронизме при снижении напряжения в сети (при удаленных коротких замыканиях) применяют форсировку тока возбуждения. Форсировка осуществляется автоматически релейной защитой, которая замыкает накоротко резисторы или реостаты в цепи обмотки возбуждения возбудителя или подвозбудителя.
Эффективность форсировки возбуждения характеризуется кратностью предельного установившегося напряжения возбудителя: Кf =Uf max/Uf н,
(где Uf max — наибольшее установившееся напряжение возбудителя; Uf н — номинальное напряжение возбуждения), а также скоростью нарастания напряжения возбудителя duf/dt.
В крупных синхронных генераторах должно быть Кf≥1,8-2,0 и
duf/dt≥ (1,5-2,0)Uf н в секунду. В остальных синхронных машинах Кf≥1,4, duf/dt≥ 0,8Uf н в секунду.
СТАТИЧЕСКАЯ УСТОЙЧИВОСТЬ




![]()
![]()
Условия статической устойчивости. Угловая характеристика синхронной машины имеет важное значение для оценки статической устойчивости и степени перегружаемости. Под статической устойчивостью синхронной машины, работающей параллельно с сетью, понимают ее способность сохранять синхронное вращение (т. е. условие п2 = п1 ) при изменении внешнего вращающего или тормозного момента Мвн , приложенного к ее валу. Статическая устойчивость обеспечивается только при углах θ, соответствующих М
Аналогичный процесс происходит и при уменьшении Мвн ; при этом соответственно уменьшаются угол θ и момент М, а следовательно, равновесие моментов также восстанавливается. Однако если машина работает при π/2 0, и неустойчиво, если dM/dθ
ΔМ = (dM/dθ)Δθ,
который стремится восстановить исходный угол θ. Этот момент называют синхронизирующим. Ему соответствует понятие синхронизирующей мощности
ΔPэм = (dPэм /dθ)Δθ.
Производные dM/dθ и dPэм /dθ называют соответственно удельным синхронизирующим моментом и удельной синхронизирующей мощностью (иногда их называют коэффициентами синхронизирующего момента и синхронизирующей мощности). При неявнополюсной машинеdM/dθ = Mmax cos θ; dPэм /dθ = Pэм max cos θ. Удельный синхронизирующий момент имеет максимальное значение при θ = 0 — с возрастанием θ он уменьшается; при θ = π/2 он равняется нулю, поэтому синхронные машины обычно работают с θ = 20 ÷ 35°, что соответствует двукратному или несколько большему запасу по моменту. Статическая перегружаемостъ синхронной машины оценивается отношением
Согласно ГОСТу это отношение для мощных генераторов должно быть не менее 1,6—1,7, а для синхронных двигателей большой и средней мощности — не менее 1,65.
Влияние тока возбуждения на устойчивость.Устойчивость генератора при заданном значении активной мощности, от-даваемой в сеть, зависит от тока возбуждения. При увеличении тока возбуждения возрастает ЭДС E0, а следовательно, и момент Мmах ; при этом увеличивается устойчивость машины.

На рис. 6.40, б изображены угловые характеристики при различных токах возбуждения (при различных E0), откуда следует, что чем больше ток возбуждения, тем меньше угол в при заданной нагрузке, а следовательно, тем больше отношение Мmах /Мном и перегрузочная способность генератора.
Обычно электрическая сеть, на которую работают синхронные генераторы, является для них активноиндуктивной нагрузкой (генераторы отдают как активную Р, так и реактивную Qмощности). При этом синхронные генераторы должны работать с некоторым перевозбуждением, обеспечивающим повышение перегрузочной способности. Так, например, согласно ГОСТу в синхронных генераторах при номинальном режиме ток Íа должен опережать напряжение сети Úc(т. е. отставать от напряжения Ú и иметь cos φ = 0,8. Однако если сеть создает активно-емкостную нагрузку (например, из-за подключения к ней большого числа статических или вращающихся компенсаторов), то генератор для поддержания стабильного напряжения работает с недовозбуждением, т. е. при токе Ia , опережающем напряжение U. Такой режим неблагоприятен для него, так как с уменьшением тока возбуждения при заданной активной мощности Р возрастает угол θ и снижается перегрузочная способность Мmах /Мном , определяющая устойчивость машины.
Регулирование тока возбуждения. В современных синхронных генераторах широко применяют автоматическое регулирование тока возбуждения для стабилизации напряжения при изменении нагрузки и повышения статической и динамической устойчивости. Для этого генераторы большой мощности снабжают регуляторами сильного действия, которые реагируют не только на отклонение напряжения U от установленного значения, но и на производные во времени dU/dt и dIa/dt; последняя производная определяется изменениями угла нагрузки dθ/dt.
Компаундированные системы возбуждения. В современных синхронных генераторах широко применяют компаундирование, т. е. автоматическое изменение тока возбуждения при изменении тока нагрузки генератора. В генераторах малой и средней мощности используют систему фазового компаундирования (рис. 6.41). В этой системе обмотка возбуждения 2генератора получает питание от обмотки якоря 1 через полупроводниковый выпрямитель 6. Ко входу выпрямителя подключены параллельно вторичные обмотки двух трансформаторов 3 и 5, первичные обмотки которых включены соответственно параллельно и последовательно с обмоткой якоря 1. Последовательно с вторичной обмоткой трансформатора 3 включен реактор 4.
На рис. 6.42, а приведена упрощенная схема замещения рассматриваемой системы при условии, что внутренние сопротивления трансформаторов 3 и 5 (см. рис. 6.41) и выпрямителя 6равны нулю. Из нее следует:
Úu = Í’в R’в + jÍu XL ,
где Í‘в — ток на входе в выпрямитель 6; Iu и Ii — выходные токи трансформаторов 3 и 5; Uu — выходное напряжение трансформатора 3; XL — индуктивное сопротивление реактора 4; R‘в — сопротивление обмотки возбуждения, приведенное к входу выпрямителя 6.
Из (6.41) и (6.42) имеем
 |
Рис. 6.41. Принципиальная схема системы фазового компаундирования |
 |
| Рис. 6.42. Схема замещения (в) и векторная диаграмма (б) системы фазового компаундирования |
Так как напряжение Uuпропорционально и совпадает по фазе с напряжением генератора U (рис. 6.42, б), а ток Ii — пропорционален и совпадает по фазе с током якоря генератора Iа, то напряжение на входе выпрямителя U‘в , а следовательно, и ток возбуждения Iвавтоматически изменяются при изменении напряжения генератора U, его тока нагрузки Iа и угла сдвига фаз φ между ними. Путем подбора коэффициентов трансформации трансформаторов 3 и 5 и индуктивности реактора 4 (его часто выполняют с подмагничиванием) можно обеспечить стабилизацию выходного напряжения генератора при изменении в широких пределах тока нагрузки и угла сдвига фаз между током и напряжением. Практически из-за насыщения магнитной системы и других причин система фазового компаундирования поддерживает напряжение U = const с точностью порядка ± 5 %. В некоторых схемах фазового компаундирования трансформаторы 3 и 5 объединяют в общий трансформатор с двумя первичными и одной вторичной обмоткой, подключенной к выпрямителю 6.
Самовозбуждение синхронного генератора в рассматриваемой системе осуществляется за счет потока остаточного магнетизма (см. более подробно § 8.8). Однако вследствие нелинейного сопротивления выпрямителя (оно увеличивается при малых токах) и других причин индуцируемая этим потоком в обмотке якоря ЭДС может оказаться недостаточной для обеспечения процесса самовозбуждения. В этом случае необходимо применять дополнительные меры для самовозбуждения генератора. К числу этих мер относятся: подключение обмотки возбуждения на период пуска генератора к внешнему источнику постоянного тока небольшой мощности, увеличение потока остаточного магнетизма путем установки на полюсах машины магнитных прокладок или применение резонансного контура.
Для получения резонансного контура на вход выпрямителя можно подключить конденсаторы7 (см. рис. 6.41), емкость которых подбирают так, чтобы при п
Статическая устойчивость
 Это незавершённая статья. Вы поможете проекту, исправив и дополнив её. Это незавершённая статья. Вы поможете проекту, исправив и дополнив её. |
Статическая устойчивость энергосистемы — способность энергосистемы возвращаться к установившемуся режиму после малых его возмущений.
Мероприятия по обеспечению статической устойчивости
Без дальних линий электропередачи
К основным мероприятиям, обеспечивающим статическую устойчивость электроэнергетических систем, не имеющих дальних электропередач, относятся:
- примеение автоматических регуляторов возбуждениясинхронных машин;
- ограничение снижения напряжения в основных узловых точках энергосистемы;
- ограничение углов сдвига роторов генераторов;
- применение автоматической разгрузки по частоте;
- обеспечение достаточных резервов активной и реактивной мощностей.
Автоматические регуляторы возбуждения синхронных машин представляют собой одно из самых эффективных средств повышения статической устойчивости энергосистемы. Наиболее важным достоинством автоматических регуляторов возбуждения является то обстоятельство, что при всяком утяжелении режима, например при переходе, от нормального режима к послеаварийному или просто ухудшении нормального (послеаварийного) режима, регуляторы автоматически увеличивают возбуждение синхронных машин, ограничиваю тем самым увеличение углов сдвига их роторов, которые вызывается ухудшением режима, а также снижение напряжений в узловых точках системы.
Поддерживая неизменным (или почти неизменным) напряжение на выводах синхронных машин, регуляторы как устраняют реактивное сопротивление генераторов в установившемся режиме и тем самым резко увеличивают предел естественной статической устойчивости энергосистемы. Этим достоинством обладают любые регуляторы возбуждения независимо от их типа.
Регуляторы возбуждения вместе с тем могут приводить к резкому увеличению генерации реактивной мощности при утяжелении режима и тем самым сильно понижают уровень критического напряжения.
Значительное расширение зоны естественной устойчивости является основным результатом применения любых автоматических регуляторов возбуждения. Однако этим не ограничивается влияние регулятора на повышение статической устойчивости энергосистемы.
Ограничение углов сдвига роторов генераторов в энергосистемах, не имеющих дальних передач, при наличии в работе автоматического регулятора возбуждения может быть обеспечено установлением некоторого минимального значения отдаваемой в электрическую сеть реактивной мощности или некоторого максимального значения коэффициента мощности в режиме выдачи реактивной мощности. При неисправности регулятора возбуждения синхронной машины в некоторых случаях ограничивают углы сдвига роторов генераторов. Значение этих углов сводятся в специальные таблицы, определяющие зависимость допустимой нагрузки генератора по активной мощности от тока возбуждения и напряжения на выводах.
При тяжёлых авариях, которые сопровождаются отключением источников активной и реактивной мощностей в случае если имеющиеся резервы не в состоянии их восполнить, частота и напряжение в энергосистеме резко понижаются вплоть до возникновения каскадных аварий.
Роль автоматических регуляторов напряжения в этих условиях исключительно велика, так как быстрое увеличение возбуждения синхронных машин позволяет удержать напряжение в энергосистеме в допустимом диапазоне. При этом аналогичную форсировку первичных двигателей генераторов, которая бы позволила поддерживать частоту, обеспечить нельзя (за исключением случаем применения крупных аккумуляторных батарей). Поэтому частота в энергосистеме резко падает. В этих условиях требуется немедленное снижение нагрузки энергосистемы. Разгрузка по частоте в данном случае преследует две цели:
- Увеличение частоты, что одновременно улучшает условия баланса реактивной мощности, увеличивая ЭДС генераторов и уменьшая потребление реактивной мощности нагрузки (за счёт регулирующего эффекта нагрузки); быстрое восстановление частоты необходимо для предупреждения опасности резкого снижения производительности агрегатов собственных нужд электростанций и, в частности, питательных насосов с электроприводом, такое понижение производительности может вызвать дальнейшее снижение частоты (лавину частоты), угрожающее распадом всей энергосистемы.
- Снятие перегрузки с генераторов, вызванной работой автоматических регуляторов возбуждения.
При наличии в энергосистеме автоматических регуляторов возбуждения на всех генераторах напряжение в течение определённого времени удерживается на уровне выше критического, что обычно даёт возможность оперативному персоналу принять меры по восстановлению нарушенного баланса мощности в энергосистеме.
Таким образом резерв реактивной мощности в системе является исключительно важным фактором, определяющим запас статической устойчивости нормального режима. При уменьшении резерва реактивной мощности уровень критического напряжения повышается. Следовательно, для энергосистем не имеющих резерва по реактивной мощности установление величины критического напряжения особенно необходимо.
Понятие статической и динамической устойчивости в электроэнергетических системах
Страницы работы

Фрагмент текста работы
1.1. Понятие статической и динамической устойчивости в электроэнергетических системах
Под устойчивостьюсостояния электрической системы понимается ее способность восстанавливать исходный режим (или достаточно близкий к нему) после воздействия какого-либо возмущения («большого» или «малого»). Процесс нарушения устойчивости в электрических системах всегда связан с ограниченной пропускной способностью ее отдельных элементов — линий связи, трансформаторов и.т.п. Естественно, что при неизменных параметрах электрической системы предел передаваемой мощности зависит от уровней напряжений и потерь передаваемой мощности на сопротивлениях элементов. Нарушения устойчивости в электрических системах происходят в результате воздействия на ее работу возмущающих факторов, которые могут быть «большими» и «малыми». Протекание процесса при этом одинаково и сопровождается в любом случае резким снижением напряжения в узлах системы (возникновением «лавины» напряжения), увеличением тока в ее ветвях, изменением скорости вращения электрических машин. Нарушение устойчивости всегда заканчивается появлением асинхронного хода, связанного с неограниченным изменением скоростей вращения синхронных машин, и часто приводит к «развалу» системы — отключению нагрузки, генераторов станций, к делению системы на несинхронно работающие части. «Малые» возмущения опасны для работы электрических систем в тяжелых режимах, когда по ее элементам протекают потоки мощности, близкие к предельным. Тогда как «большие» возмущения могут вызвать нарушение устойчивости в нормальных режимах. В зависимости от причины, которая привела к нарушению устойчивости, выделяются три се вида: — статическая устойчивость — способность системы сохранять (восстанавливать) исходный (или близкий к нему) режим при действии «малых» возмущений. — динамическая устойчивость — способность системы восстанавливать длительно существующий установившийся режим при «больших» возмущениях. — результирующая устойчивость — способность системы возвращаться в длительно существующий установившийся режим после кратковременного нарушения устойчивости.
Статическая устойчивость синхронного генератора
Оценка статической устойчивости синхронного генератора, включенного на шины энергосистемы (рис.1), может быть выполнена при помощи второго закона Ньютона для вращающегося тела
 (1.1.1)
(1.1.1)
где Mв — вращающий момент на валу энергетического двигателя, кг.м; Мс — момент сопротивления (тормозной момент) на валу генератора, кг.м ; ω — угловая частота вращения вала агрегата, с -1 ;
 -момент инерции, кг.м.с 2
-момент инерции, кг.м.с 2  ; GD 2 — маховые массы вращающихся частей, присоединенные к валам энергетического двигателя и генератора, кг.м 2 ; g = 9,81 м/с 2 -ускорение земного притяжения.
; GD 2 — маховые массы вращающихся частей, присоединенные к валам энергетического двигателя и генератора, кг.м 2 ; g = 9,81 м/с 2 -ускорение земного притяжения.

1. Схема электропередачи мощности от синхронного генератора в энергосистему и ее схема замещения: Т — турбина; Г — генератор; Т1 — трансформатор подстанции; Л1, Л2 — линии электропередачи; Т2 — трансформатор связи с энергосистемой; ЭС – энергосистема.
Статическая устойчивость синхронного агрегата оценивается при постоянной синхронной частоте вращения, при которой мощности на валу энергетического двигателя и синхронного генератора пропорциональны моментам, а в относительных единицах равны, т. е.

Статическая устойчивость оценивается при относительном движении ротора агрегата, т. е. при перемещении ротора относительно вектора вращающегося электромагнитного поля статора генератора (рис.2), при изменении угла вылета ротора. Скорость его изменения соответствует производной  (1.1.2)
(1.1.2)
При относительном движении ротора генератора уравнение движения (1.1.1) можно представиться в следующем виде:
 (1.1.3)
(1.1.3)
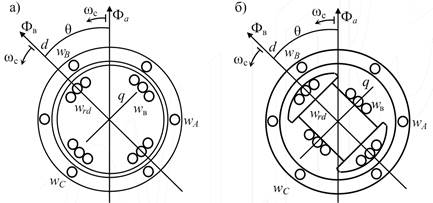
Рис. 2. Принципиальные конструктивные схемы синхронных генераторов: а — неявнополюсный; б — явнополюсный
Это уравнение — уравнение динамического равновесия, ибо при равенстве Рт = Рг угол вылета ротора 0 имеет постоянную величину. Если равенства мощностей нет, то имеет место либо ускорение агрегата при Pт > Pг, либо замедление при Рт
Пояснение к работе. Теория статической устойчивости синхронных генераторов наиболее полно разработана для простейшей энергосистемы «генератор — линия — шины бесконечной
Теория статической устойчивости синхронных генераторов наиболее полно разработана для простейшей энергосистемы «генератор — линия — шины бесконечной мощности». Исследования устойчивости сложных регулируемых систем обычно рекомендуется проводить общими методами.
Однако суммарный порядок дифференциальных уравнений сложной схемы катастрофически возрастает, особенно при учете регулирования возбуждения. В результате существенно осложняются постановка и решение задачи выбора оптимальных законов и коэффициентов регулирования.
Необходимы простые и в то же время надежные способы эквивалентирования схем и режимов электроэнергетических систем, т. е. возможность замены всей внешней сети исследуемой станции эквивалентной схемой «линия — шины бесконечной мощности».
Значения эквивалентных внешних сопротивлений составляют 0,1. 0,5 о. е. при базисной мощности, равной полной мощности генераторов станции, подключенных к данной системе шин. При этом ХВН является долгоживущим параметром, который сколько-нибудь заметно изменяется только при вводе в эксплуатацию новой линии, отходящей непосредственно от шин станции, или в ремонтных режимах. Схемные изменения, происходящие за переключательными пунктами, незначительно влияют на его величину. Предлагаемый способ эквивалентирования внешней сети прост, надежен и обеспечивает более высокую точность.
Одной из основных задач систем регулирования возбуждения является стабилизация режима станции. Общее движение всех генераторов относительно эквивалента системы имеет название «внешнее». В то же время отдельные генераторы, работающие на общие шины, будучи все вместе устойчивы относительно UC, могут обмениваться электромагнитной энергией между собой. При этом они совершают так называемое внутригрупповое движение. Модель для внешнего движения может быть составлена с помощью уравнений Парка — Горева для схемы «генератор — линия — шины» при условии, что параметры генератора соответствуют параметрам эквивалентного генератора станции, а связь с энергосистемой осуществляется через ХВН.
Исследования внутригруппового движения базируется на расчетной схеме, полученной В. М. Матюхиным в результате анализа характеристического уравнения системы, описывающей группу параллельных симметричных генераторов станции, работающих через линию электропередачи на шины бесконечной мощности. Для составления правильной расчетной модели рассматривают систему из двух генераторов, включенных на общие шины и работающих через линию с сопротивлением ХВН на систему бесконечной мощности.
Далее дополняем модель объекта звеньями, описывающими возбудитель и регулятор возбуждения, получаем полную структурную схему для исследования внешнего движения. На первом этапе примем допущение о безынерционности АРВ и возбудителя. Тогда их действие можно отразить, записав закон регулирования, реализуемый регулятором.
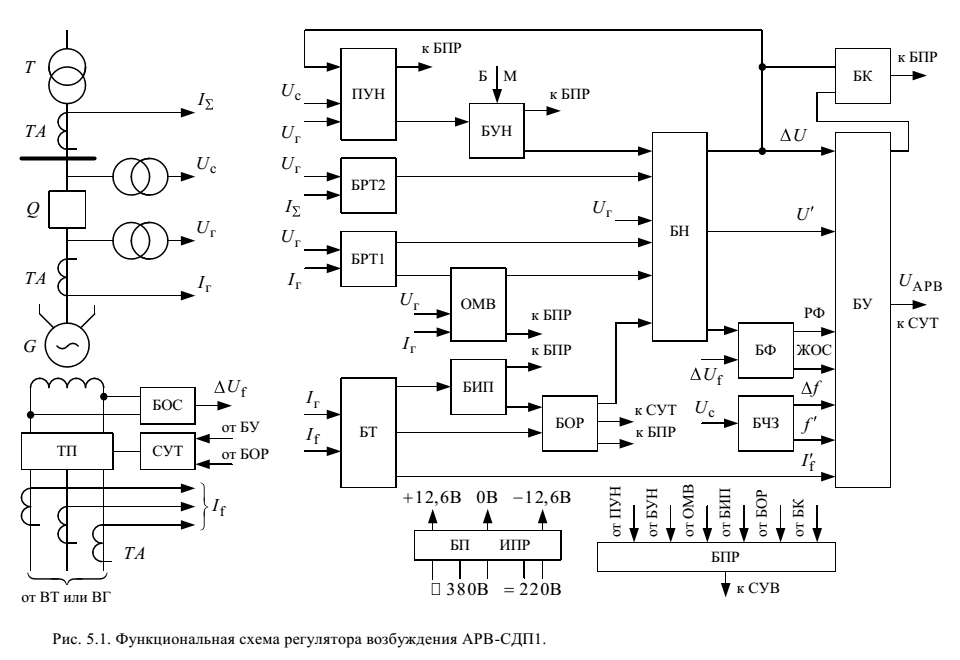
В настоящее время одним из наиболее распространенных регуляторов является АРВ СДП1, который является пропорционально-дифференциальным регулятором по отклонению напряжения со стабилизацией режима по производной тока возбуждения, отклонению и производной частоты напряжения. По сравнению с предшественниками он выполняет большее количество функций, структурно отличается частотно- зависимой характеристикой канала регулирования напряжения, что повышает качество поддержания напряжения, увеличивает устойчивость регулирования и инвариантность настройки к изменению режима работы генератора и сети за счет динамического снижения коэффициента усиления по отклонению напряжения в области частот собственных колебаний.
Регулятор совместно с быстродействующей системой возбуждения выполняет большое число разнообразных функций, которые условно можно разделить на четыре группы: системные, технологические, защитные, самоконтроль и диагностика.
В состав регулятора входят 16 блоков (рис. 5.1), основные из них:
1. Блок питания (БП) подключен к трансформатору собственных нужд переменного тока системы возбуждения. Он преобразует входное трехфазное напряжение в стабилизированное напряжение постоянного тока величиной ±12,6 В, которым питаются все блоки регулятора. При отсутствии переменного трехфазного напряжения или при отказе БП происходит автоматическое переключение питания АРВ на резервный источник ИПР, подключенный к сети постоянного оперативного тока станции.
2. Блок уставки напряжения (БУН) формирует значение уставки регулируемого напряжения. Управление уставкой осуществляется от кнопок на лицевой панели БУН или дистанционно от ключа на блочном или общестанционном щите управления.
3. Блок напряжения (БН) формирует сигналы отклонения напряжения статора от заданного значения и первой производной напряжения статора.
4. Блок реактивного тока БРТ-1 формирует сигнал, пропорциональный реактивной составляющей тока статора генератора для реализации заданного статизма регулирования. В случае работы генераторов на общие шины статизм регулирования задается отрицательным, а при работе блока «генератор — трансформатор» — положительным.
5. Блок реактивного тока БРТ-2 формирует сигнал, пропорциональный реактивной составляющей группы генераторов, объединенных шинами генераторного напряжения. Этот сигнал компенсирует падение напряжения в общем повышающем трансформаторе и восстанавливает требуемый статизм. Так обеспечивается устойчивая работа группы генераторов при низком статизме.
6.Блок токов (БТ) вырабатывает напряжения, пропорциональные токам ротора и статора, которые затем используются для ограничения перегрузок. Кроме того, БТ формирует сигнал стабилизации по производной тока ротора.
7. Тепловые характеристики нагрева заложены в блоке измерения перегрузки (БИП). В зависимости от величины перегрузки БИП отсчитывает допустимую выдержку времени и выдает сигнал о перегреве.
8.Блок ограничения тока ротора (БОР) осуществляет ограничение максимального тока ротора, воздействуя на систему управления тиристорами, а также уменьшает уставку напряжения при перегреве генератора до допустимого уровня.
9. Форсирование возбуждения при снижении напряжения статора ниже заданной уставки обеспечивает блок форсировки (БФ). Благодаря этому обеспечиваются высокие пределы динамической устойчивости.
10. Блок ограничения минимального возбуждения (ОМВ) осуществляет защиту торцевых зон статора от недопустимого нагрева. В него закладывается граница допустимых режимов в координатах активной и реактивной составляющих тока статора. При выходе режима работы генератора за ее пределы безынерционно увеличивается уставка напряжения статора. Если конструкция генератора исключает перегрев торцевых зон, то граница ОМВ может быть перестроена на ограничение внутреннего угла генератора (ограничение по устойчивости).
11.Сигналы стабилизации, пропорциональные изменению и первой производной частоты напряжения, формирует блок частоты и защиты (БЧЗ). При одновременном увеличении напряжения статора, частоты и производной частоты, что характерно при обрыве электропередачи, выход БЧЗ блокируется с целью исключения ложного форсирования.
12.Подгонка напряжения генератора к напряжению сети при автоматической точной синхронизации и самосинхронизации осуществляется блоком подгонки (ПУН). После окончания подгонки ПУН выдает соответствующий сигнал.
13.Суммирование и усиление сигналов регулирования и стабилизации происходят на блоке усиления (БУ). Его выходной сигнал является выходом АРВ, поэтому БУ осуществляет гальваническую развязку между цепями АРВ и системы управления тиристорным преобразователем (СУТ).
На рис. 5.1 модель регулятора представляет собой совокупность передаточных функций узлов и блоков АРВ, отражающих динамические свойства регулятора в диапазоне частот колебаний от 0,2 до 5,0 Гц. Физическими входами АРВ являются периодические сигналы измерительных трансформаторов тока и напряжения, пропорциональные напряжению иг и току 1г статора, току ротора If и суммарному току группы генераторов Ie. Кроме того, в бесщеточных системах возбуждения от блока обратной связи (БОС) на вход АРВ поступает сигнал напряжения ротора Uf.
Измерительные преобразователи формируют на основе входной информации сигналы, которые для малых отклонений можно интерпретировать как изменение напряжения Диг, частоты напряжения A/U, реактивных составляющих тока статора AIRt и группы генераторов AIre, тока AIf и напряжения AUf ротора. В результате на выходе АРВ формируется сигнал:

Созданием и внедрением в эксплуатацию АРВ-СДП1 завершилась третья стадия развития регулирования возбуждения сильного действия. В настоящее время выпускаются четыре модификации для работы в составе одно- и двухгрупповых систем возбуждения генераторов обычного исполнения и обратимых агрегатов ГАЭС. Ими оснащаются все генераторы мощностью 63 МВт и выше, выпускаемые в СНГ.
Сохранив функции поддержания напряжения и обеспечения устойчивости генератора, регулятор, получивший название автоматический регулятор напряжения (АРН), значительно упростился. При его разработке были учтены рекомендации о целесообразности уменьшения по сравнению с АРВ-СДП1 пропорциональной составляющей сигнала регулирования по напряжению в области частоты собственных колебаний агрегата. Все это повысило надежность и облегчило наладку и эксплуатацию АРН.
АРН выпускается в двух модификациях, предназначенных для работы в составе статической тиристорной и бесщеточной систем возбуждения, и уже внедрен на ряде тепловых электростанций. АРН предназначен для работы в составе тиристорных систем самовозбуждения и бесщеточных систем возбуждения синхронных генераторов малой и средней мощности (от 2,5 до 63 МВт). Регулятор реализует ПИД-закон регулирования напряжения статора генератора с компаундированием по реактивной составляющей тока статора и со стабилизацией по первой производной тока ротора.
Вопрос 27
Статична та динамічна стійкість паралельної роботи синхронних генераторів.
Под устойчивостью СЭЭС понимают ее способность переходить от одного устойчивого режима к другому, также устойчивому режиму после различного рода возмущений. Различают статическую и динамическую устойчивость работы СЭЭС и ее элементов.
Статической устойчивостью СЭЭС называют ее способность возвращаться к исходному режиму (или весьма близкому к нему) после малых изменений ее параметров.
Динамической устойчивостью СЭЭС называют ее способность переходить от исходного устойчивого режима к другому, также устойчивому режиму либо вернуться к установившемуся режиму, близкому к исходному, после больших изменений ее параметров.
Устойчивость работы СЭЭС включает в себя два понятия – устойчивость параллельной работы генераторов и устойчивость нагрузки.
Нарушение устойчивой работы СГ проявляется в следующем: переходе в двигательный режим; нарушении синхронной связи и переходе в асинхронный режим; нестабильном распределении нагрузки или её постоянном колебании между параллельно работающими генераторами; отключении защитными средствами под действием максимальных прямых и обратных токов.
При рассмотрении работы асинхронной нагрузки под устойчивостью понимают способность АД продолжать работать на устойчивой части механической характеристики при значительных, но ограниченных по времени провалах напряжения в сети.
Статическая устойчивость параллельной работы синхронных генераторов
Из теории электрических машин известно, что, пренебрегая явнополюсностью ротора, электромагнитная мощность синхронного генератора
 (1)
(1)
где Е, U—соответственно э. д. с. и напряжение обмотки статора;
xd — синхронное индуктивное сопротивление обмотки статора;
— угол между векторами э. д. с. и напряжения, а также между векторами м. д. с. обмотки статора и обмотки ротора в пространстве.
Эту зависимость называют угловой характеристикой синхронной машины (рис. 1). Ее часть, расположенная выше оси абсцисс, соответствует режиму работы генератором, а часть, расположенная ниже оси абсцисс, — режиму работы двигателем.

Рисунок 27.1. Угловая характеристика синхронного генератора
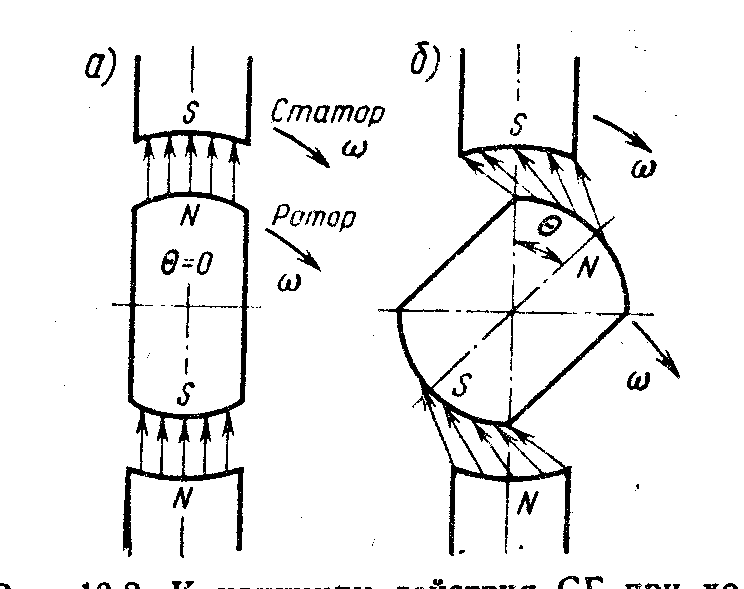
Рисунок 27.2. Принцип действия СГ в режиме холостого хода (а) и под нагрузкой (б)
При холостом ходе = 0 (рис.27, а) механическая мощность, приложенная к валу генератора со стороны приводного двигателя, и электромагнитная мощность, отдаваемая генератором, также равны нулю. При увеличении подачи топлива (или пара) приводному двигателю генератора его ротор «забегает» вперед относительно статора на некоторый угол , вызывая растяжение магнитных линий (рис.27, б). Генератор развивает электромагнитную мощность, равную (но противоположную по знаку) механической мощности на валу, и ротор продолжает равномерное вращение с прежней (синхронной) частотой. При номинальной нагрузке генераторов =15 30°. Дальнейшему повышению механической мощности на валу генератора (см. рис. 27.1) будет соответствовать увеличение угла на + и электромагнитной мощности генератора на + Р вплоть до угла = 90°. При = 90° увеличение механической мощности на валу вызывает увеличение угла на + и уменьшение электромагнитной мощности генератора на — Р. К ротору генератора будет приложена избыточная мощность, под действием которой угол будет непрерывно увеличиваться. В результате магнитная связь между ротором и статором нарушается, и генератор переходит в асинхронный или двигательный режим работы с последующим отключением его защитой.
Значение максимальной мощности генератора (статический предел мощности) соответствует углу = 90° (sin =1) и определяется выражением
 (2)
(2)
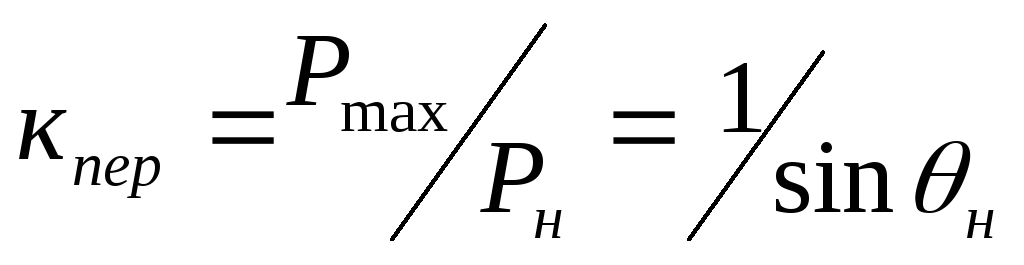
Отношение максимальной мощности к номинальной называется перегрузочной способностью генератора:
 (3)
(3)
Данный коэффициент характеризует запас статической устойчивости генератора.
Отношение Р/ или в пределе dP/d принято называть синхронизирующей мощностью Рсинх. Величину dP/d называют еще практическим критерием статической устойчивости. Ее положительный знак характеризует способность генератора обеспечить синхронную работу с данной системой. Синхронизирующая мощность при значениях угла от 0 до 90° — положительна, а в пределах от 90 до 180° — отрицательна. При = 90° синхронизирующая мощность равна нулю, и с этого момента генератор не может работать параллельно с другими генераторами
Таким образом, участок ОА кривой (см. рис. 27.1) соответствует устойчивой работе, а участок АВ — неустойчивой. Условие dP/d >0 является условием статической устойчивости работы синхронного генератора.
Значение угла при номинальной нагрузке генератора находится в пределах 25 — 35. При этом sinн в среднем равен 0,5, а кпер = 2, т. е. по статической устойчивости допускается перегрузка генератора в два раза. При возникновении подобных и даже меньших перегрузок генераторов СЭЭС производится автоматическое отключение ряда приемников электроэнергии, а в крайнем случае отключение генераторов. При переходе генератора в двигательный режим он отключается защитой.
Иногда при резком увеличении нагрузки генератора может произойти проворачивание генератора на 360. Машину не следует немедленно отключать, так как после подачи топлива или пара машина снова переходит в двигательный режим.
Из формулы 1 видно, что статический предел мощности можно повышать, увеличивая э. д. с. и напряжение или уменьшая синхронную реактивность сопротивления генератора. Последнее связано с увеличением воздушного зазора, а следовательно, с ростом массы, габаритных размеров и стоимости генератора, а также с увеличением тока к. з. Наиболее простым и эффективным средством повышения статической устойчивости считается увеличение э.д.с. генератора. При весьма сильном возбуждении можно добиться устойчивой работы генераторов даже при угле несколько превышающем 90° (зона искусственной устойчивости).
Нарушение статической устойчивости генераторов наиболее вероятно при большом снижении напряжения на шинах электростанции, в результате чего резко уменьшается статический предел мощности.
В случае ненормальной работы регуляторов частоты вращения возможно ненормальное перераспределение мощности между параллельно работающими генераторами, при котором один из них может быть перегружен в 2—2,5 раза и достигнет статического предела мощности. В результате произойдет затормаживание приводных двигателей генераторов или отключение генератора защитой от перегрузки.
Сохранение СЭЭС устойчивости при малых отклонениях параметров обязательная, но еще недостаточная предпосылка для сохранения ее динамической устойчивости. Система, устойчивая статически, может оказаться неустойчивой в динамическом режиме.
Динамическую устойчивость работы генераторов рассмотрим на примере мгновенного уменьшения напряжения в системе, когда генератор с угловой характеристики 1 переходит на работу в режиме, которому соответствует угловая характеристика 2 (рис. 27.3).
Точка А характеристики 1 соответствует работе генератора при номинальном напряжении, при котором угол равен н. При резком уменьшении напряжения в сети угол в вследствие инерции вращающихся масс ГА не может измениться мгновенно, а электромагнитный момент генератора резко уменьшится, т. е. точка А с характеристики 1 переместится в точку В характеристики 2 при =н. Мощность, отдаваемая генератором, уменьшится от Рн до P1, а мощность приводного двигателя Рп.д. сохраняется. Под действием разности мощностей Рп.д. — Р1 > 0 ротор генератора получит ускорение, его угловая скорость будет расти (см. годограф угловой скорости на рис. 27.3) и угол начнет увеличиваться.
В точке С наступит равенство мощностей генератора и приводного двигателя Рп.д=Рн, но из-за инерции ГА ротор генератора будет отклоняться до точки D. На участке CD мощность генератора больше мощности приводного двигателя Рп.д 90°.
Если же при переходе с характеристики 1 на характеристику 2 (рис. 27.3.) площадь S1 фигуры АВС будет больше площади S2 фигуры CD, то для сохранения динамической устойчивости при угле 2 необходимо восстановить напряжение до первоначального значения. При этом работа генератора будет характеризоваться не точкой D характеристики 2, а точкой Е характеристики 1 и затем точкой F, после чего площадь S2 фигуры CDEFG будет равна площади S1 фигуры АВС и ротор начнет обратное движение к точке А (см. рис. 27.3, б) по пути F—Е—А.
Таким образом, динамическая устойчивость параллельной работы синхронных генераторов обеспечивается при условиях:
 .
.
Анализ динамической устойчивости методом площадей применим при исследовании параллельной работы генератора с мощной сетью. Его можно использовать и при изучении параллельной работы двух генераторов, имеющих различные приводные двигатели (турбогенераторов и дизель-генераторов) или генераторов различной мощности (при одинаковых приводных двигателях). Последнее ограничение объясняется большим различием механических постоянных времени, которые характеризуют инерционные свойства различных типов ГА. Опыты показывают, что при затянувшихся к. з. и в случае, когда напряжение падает почти до нуля, параллельная работа генераторов нарушается, т. е. они оказываются не связанными друг с другом (работающими раздельно). Однако при достаточной чувствительности и идентичности регуляторов напряжения и частоты после отключения к. з. частоты вращения генераторов мало отличаются одна от другой и в отдельные моменты могут совпадать. В эти моменты и происходит сцепление магнитных полей ротора и статора, т. е. ресинхронизация. При одинаковых приводных двигателях время отключения КЗ не должно превышать 0,5 с.
Кратковременное нарушение динамической устойчивости параллельной работы генераторов с последующей ресинхронизацией и качаниями роторов в большинстве случаев не опасно, а длительное – опасно всегда, посколько сопровождается большими токами и провалами напряжения, переходом генераторов в двигательный режим. В связи с эти автоматические устройства защиты должны отключать генераторы с определенной выдержкой времени.





