Электродвигатель с постоянными магнитами как генератор
Синхронный двигатель с постоянными магнитами
- Управление синхронным электродвигателем с постоянными магнитами
- Трапециидальное управление
- Полеориентированное управление
Главное отличие между синхронным двигателем с постоянными магнитами (СДПМ) и асинхронным электродвигателем заключается в роторе. Проведенные исследования 1 показывают, что СДПМ имеет КПД примерно на 2% больше, чем высоко эффективный (IE3) асинхронный электродвигатель, при условии, что статор имеет одинаковую конструкцию, а для управления используется один и тот же частотный преобразователь. При этом синхронные электродвигатели с постоянными магнитами по сравнению с другими электродвигателями обладают лучшими показателями: мощность/объем, момент/инерция и др.
Конструкции и типы синхронного электродвигателя с постоянными магнитами
Синхронный электродвигатель с постоянными магнитами, как и любой вращающийся электродвигатель, состоит из ротора и статора. Статор — неподвижная часть, ротор — вращающаяся часть.

Обычно ротор располагается внутри статора электродвигателя, также существуют конструкции с внешним ротором — электродвигатели обращенного типа.

Ротор состоит из постоянных магнитов. В качестве постоянных магнитов используются материалы с высокой коэрцитивной силой.
Электродвигатель с неявно выраженными полюсами имеет равную индуктивность по продольной и поперечной осям Ld = Lq, тогда как у электродвигателя с явно выраженными полюсами поперечная индуктивность не равна продольной Lq ≠ Ld.

-
Также по конструкции ротора СДПМ делятся на:
- синхронный двигатель c поверхностной установкой постоянных магнитов
(англ. SPMSM — surface permanent magnet synchronous motor); - синхронный двигатель со встроенными (инкорпорированными) магнитами
(англ. IPMSM — interior permanent magnet synchronous motor).


Статор состоит из корпуса и сердечника с обмоткой. Наиболее распространены конструкции с двух- и трехфазной обмоткой.
-
В зависимости от конструкции статора синхронный двигатель с постоянными магнитами бывает:
- с распределенной обмоткой;
- с сосредоточенной обмоткой.


Распределенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 2, 3. k.
Сосредоточенной называют такую обмотку, у которой число пазов на полюс и фазу Q = 1. При этом пазы расположены равномерно по окружности статора. Две катушки, образующие обмотку, можно соединить как последовательно, так и параллельно. Основной недостаток таких обмоток — невозможность влияния на форму кривой ЭДС [2].


-
Форма обратной ЭДС электродвигателя может быть:
- трапецеидальная;
- синусоидальная.
Форма кривой ЭДС в проводнике определяется кривой распределения магнитной индукции в зазоре по окружности статора.
Известно, что магнитная индукция в зазоре под явно выраженным полюсом ротора имеет трапециидальную форму. Такую же форму имеет и наводимая в проводнике ЭДС. Если необходимо создать синусоидальную ЭДС, то полюсным наконечникам придают такую форму, при которой кривая распределения индукции была бы близка к синусоидальной. Этому способствуют скосы полюсных наконечников ротора [2].
Принцип работы синхронного двигателя
Принцип действия синхронного электродвигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора. Концепция вращающегося магнитного поля статора синхронного электродвигателя такая же, как и у трехфазного асинхронного электродвигателя.
Принцип работы синхронного двигателя основан на взаимодействии вращающегося магнитного поля статора и постоянного магнитного поля ротора.


Магнитное поле ротора, взаимодействуя с синхронным переменным током обмоток статора, согласно закону Ампера, создает крутящий момент, заставляя ротор вращаться (подробнее).
Постоянные магниты, расположенные на роторе СДПМ, создают постоянное магнитное поле. При синхронной скорости вращения ротора с полем статора, полюса ротора сцепляются с вращающимся магнитным полем статора. В связи с этим СДПМ не может сам запуститься при подключении его напрямую к сети трехфазного тока (частота тока в сети 50Гц).
Управление синхронным двигателем с постоянными магнитами
Для работы синхронного двигателя с постоянными магнитами обязательно требуется система управления, например, частотный преобразователь или сервопривод. При этом существует большое количество способов управления реализуемых системами контроля. Выбор оптимального способа управления, главным образом, зависит от задачи, которая ставится перед электроприводом. Основные методы управления синхронным электродвигателем с постоянными магнитами приведены в таблице ниже.
| Управление | Преимущества | Недостатки | |||
|---|---|---|---|---|---|
| Синусоидальное | Скалярное | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| Векторное | Полеориентированное управление | С датчиком положения | Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования | Требуется датчик положения ротора и мощный микроконтроллер системы управления | |
| Без датчика положения | Не требуется датчик положения ротора. Плавная и точная установка положения ротора и скорости вращения двигателя, большой диапазон регулирования, но меньше, чем с датчиком положения | Бездатчиковое полеориентированное управление во всем диапазоне скоростей возможно только для СДПМ с ротором с явно выраженными полюсами, требуется мощная система управления | |||
| Прямое управление моментом | Простая схема управления, хорошие динамические характеристики, большой диапазон регулирования, не требуется датчик положения ротора | Высокие пульсации момента и тока | |||
| Трапециидальное | Без обратной связи | Простая схема управления | Управление не оптимально, не подходит для задач, где нагрузка меняется, возможна потеря управляемости | ||
| С обратной связью | С датчиком положения (датчиками Холла) | Простая схема управления | Требуются датчики Холла. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | ||
| Без датчика | Требуется более мощная система управления | Не подходит для работы на низких оборотах. Имеются пульсации момента. Предназначен для управления СДПМ с трапециидальной обратной ЭДС, при управлении СДПМ с синусоидальной обратной ЭДС средний момент ниже на 5%. | |||
Для решения несложных задач обычно используется трапециидальное управление по датчикам Холла (например — компьютерные вентиляторы). Для решения задач, которые требуют максимальных характеристик от электропривода, обычно выбирается полеориентированное управление.
Трапециидальное управление
Одним из простейших методов управления синхронным двигателем с постоянными магнитами является — трапецеидальное управление. Трапециидальное управление применяется для управления СДПМ с трапециидальной обратной ЭДС. При этом этот метод позволяет также управлять СДПМ с синусоидальной обратной ЭДС, но тогда средний момент электропривода будет ниже на 5%, а пульсации момента составят 14% от максимального значения. Существует трапециидальное управление без обратной связи и с обратной связью по положению ротора.
Управление без обратной связи не оптимально и может привести к выходу СДПМ из синхронизма, т.е. к потери управляемости.
-
Управление с обратной связью можно разделить на:
- трапециидальное управление по датчику положения (обычно — по датчикам Холла);
- трапециидальное управление без датчика (бездатчиковое трапециидальное управление).
В качестве датчика положения ротора при трапециидальном управлении трехфазного СДПМ обычно используются три датчика Холла встроенные в электродвигатель, которые позволяют определить угол с точностью ±30 градусов. При таком управление вектор тока статора принимает только шесть положений на один электрический период, в результате чего на выходе имеются пульсации момента.

Полеориентированное управление
Полеориентированное управление позволяет плавно, точно и независимо управлять скоростью и моментом бесщеточного электродвигателя. Для работы алгоритма полеориентированного управления требуется знать положение ротора бесщеточного электродвигателя.
-
Существует два способа определения положения ротора:
- по датчику положения;
- без датчика — посредством вычисления угла системой управления в реальном времени на основе имеющейся информации.
Полеориентированное управление СДПМ по датчику положения
-
В качестве датчика угла используются следующие типы датчиков:
- индуктивные: синусно-косинусный вращающийся трансформатор (СКВТ), редуктосин, индуктосин и др.;
- оптические;
- магнитные: магниторезистивные датчики.

Полеориентированное управление СДПМ без датчика положения
Благодаря бурному развитию микропроцессоров с 1970-х годов начали разрабатываться бездатчиковые векторные методы управления бесщеточными электродвигателями переменного тока. Первые бездатчиковые методы определения угла были основаны на свойстве электродвигателя генерировать обратную ЭДС во время вращения. Обратная ЭДС двигателя содержит в себе информацию о положении ротора, поэтому вычислив величину обратной ЭДС в стационарной системе координат можно рассчитать положение ротора. Но, когда ротор не подвижен, обратная ЭДС отсутствует, а на низких оборотах обратная ЭДС имеет маленькую амплитуду, которую сложно отличить от шума, поэтому данный метод не подходит для определения положения ротора двигателя на низких оборотах.
-
Существует два распространенных варианта запуска СДПМ:
- запуск скалярным методом — запуск по заранее определенной характеристики зависимости напряжения от частоты. Но скалярное управление сильно ограничивает возможности системы управления и параметры электропривода в целом;
- метод наложения высокочастотного сигнала – работает только с СДПМ у которого ротор имеет явно выраженные полюса.

На текущий момент бездатчиковое полеориентированное управление СДПМ во всем диапазоне скоростей возможно только для двигателей с ротором с явно выраженными полюсами.
Устройство и принцип работы двигателя на постоянных магнитах
Двигатели на протяжении многих лет используются для преобразования электрической энергии в механическую различного типа. Эта особенность определяет столь высокую его популярность: обрабатывающие станки, конвейеры, некоторые бытовые приборы – электродвигатели различного типа и мощности, габаритных размеров используются повсеместно.

- Устройство ↓
- Принцип работы ↓
- Виды ↓
- Преимущества и недостатки ↓
- Как сделать своими руками? ↓
- Рекомендации ↓
Основные показатели работы определяют то, какой тип конструкции имеет двигатель. Существует несколько разновидностей, некоторые пользуются популярностью, другие не оправдывают сложность подключения, высокую стоимость.
Двигатель на постоянных магнитах используют реже, чем асинхронный вариант исполнения. Для того, чтобы оценить возможности этого варианта исполнения, следует рассмотреть особенности конструкции, эксплуатационные качества и многое другое.
Устройство

Электродвигатель на постоянных магнитах не сильно отличается по виду конструкции.
При этом, можно выделить следующие основные элементы:
- Снаружи используется электротехническая сталь, из которой изготавливается сердечник статора.
- Затем идет стержневая обмотка.
- Ступица ротора и за ней специальная пластина.
- Затем, изготовленные из электротехнической стали, секции редечника ротора.
- Постоянные магниты являются частью ротора.
- Конструкцию завершает опорный подшипник.
Как любой вращающийся электродвигатель, рассматриваемый вариант исполнения состоит из неподвижного статора и подвижного ротора, которые при подаче электроэнергии взаимодействую между собой. Отличие рассматриваемого варианта исполнения можно назвать наличие ротора, в конструкцию которого включены магниты постоянного типа.
Принцип работы

Принцип работы рассматриваемого варианта исполнения основан на создании центробежной силы за счет магнитного поля, которое создается при помощи обмотки. Стоит отметить, что работа синхронного электродвигателя схожа с работой трехфазного асинхронного двигателя.
К основным моментам можно отнести:
- Создаваемое магнитное поле ротора вступает во взаимодействие с подаваемым током на обмотку статора.
- Закон Ампера определяет создание крутящего момента, который и заставляет выходной вал вращаться вместе с ротором.
- Магнитное поле создается установленными магнитами.
- Синхронная скорость вращения ротора с создаваемым полем статора определяет сцепление полюса магнитного поля статора с ротором. По этой причине, рассматриваемый двигатель нельзя использовать в трехфазной сети напрямую.
В данном случае, нужно в обязательном порядке устанавливать специальный блок управления.
 В зависимости от особенностей конструкции, существует несколько типов синхронных двигателей. При этом, они обладают разными эксплуатационными качествами.
В зависимости от особенностей конструкции, существует несколько типов синхронных двигателей. При этом, они обладают разными эксплуатационными качествами.
По типу установки ротора, можно выделить следующие типы конструкции:
- С внутренней установкой – наиболее распространенный тип расположения.
- С внешней установкой или электродвигатель обращенного типа.
Постоянные магниты включены в конструкцию ротора. Их изготавливают из материала с высокой коэрцитивной силой.
Эта особенность определяет наличие следующих конструкций ротора:
- Со слабо выраженным магнитным полюсом.
- С ярко выраженным полюсом.
Кроме этого, конструкция ротора может быть следующего типа:
- Поверхностная установка магнитов.
- Встроенное расположение магнитов.
Кроме ротора, также следует обратить внимание и на статор.
По типу конструкции статора, можно разделить электродвигатели на следующие категории:
- Распределенная обмотка.
- Сосредоточенная обмотка.
По форме обратной обмотке, можно провести нижеприведенную классификацию:
- Синусоида.
- Трапецеидальная.
Подобная классификация оказывает влияние на работу электродвигателя.
Преимущества и недостатки
Рассматриваемый вариант исполнения имеет следующие достоинства:
- Оптимальный режим работы можно получить при воздействии реактивной энергии, что возможно при автоматической регулировке тока. Эта особенность обуславливает возможность работы электродвигателя без потребления и отдачи реактивной энергии в сеть. В отличие от асинхронного двигателя, синхронный имеет небольшие габаритные размеры при той же мощности, но при этом КПД значительно выше.
- Колебания напряжения в сети в меньшей степени воздействую на синхронный двигатель. Максимальный момент пропорционален напряжению сети.
- Высокая перегрузочная способность. Путем повышения тока возбуждения, можно провести значительное повышение перегрузочной способности. Это происходит на момент резкого и кратковременного возникновения дополнительной нагрузки на выходном валу.
- Скорость вращения выходного вала остается неизменной при любой нагрузке, если она не превышает показатель перегрузочной способности.
К недостаткам рассматриваемой конструкции можно отнести более сложную конструкцию и вследствие этого более высокую стоимость, чем у асинхронных двигателей. Однако в некоторых случаях, обойтись без данного типа электродвигателя невозможно.
Как сделать своими руками?

Провести создание электродвигателя своими руками можно только при наличии знаний в области электротехнике и наличия определенного опыта. Конструкция синхронного варианта исполнения должна быть высокоточной для исключения возникновения потерь и правильности работы системы.
 Зная то, как должна выглядеть конструкция, проводим следующую работу:
Зная то, как должна выглядеть конструкция, проводим следующую работу:
- Создается или подбирается выходной вал. Он не должен иметь отклонений или других дефектов. В противном случае, возникающая нагрузка может привести к искривлению вала.
- Наибольшей популярностью пользуются конструкции, когда обмотка находится снаружи. На посадочное место вала устанавливается статор, который имеет постоянные магниты. На валу должно быть предусмотрено место для шпонки для предотвращения прокручивания вала при возникновении серьезной нагрузки.
- Ротор представлен сердечником с обмоткой. Создать самостоятельно ротор достаточно сложно. Как правило, он неподвижен, крепится к корпусу.
- Механической связи между статором и ротором нет, так как в противном случае, при вращении будет создавать дополнительная нагрузка.
- Вал, на котором крепится статор, также имеет посадочные места для подшипников. В корпусе имеется посадочные места для подшипников.
Электродвигатели имеют сложную конструкцию, питание от сети 220 Вольт обуславливает соблюдение определенных норм при их создании. Именно поэтому, для того, чтобы быть уверенным в надежной работе подобного механизма, следует покупать варианты исполнения, созданные на заводах по выпуску подобного оборудования.
В научных целях, к примеру, в лаборатории для проведения испытаний по работе магнитного поля часто создают собственные двигатели. Однако они имеют небольшую мощность, питаются от незначительно напряжения и не могут быть применены в производстве.
Рекомендации

Выбор рассматриваемого электродвигателя следует проводить с учетом следующих особенностей:
- Мощность – основной показатель, который влияет на срок службы. При возникновении нагрузки, которая превосходит возможности электродвигателя, он начинает перегреваться. При сильной нагрузке, возможно искривление вала и нарушение целостности других компонентов системы. Поэтому следует помнить о том, что диаметр вала и другие показатели выбираются в зависимости от мощности двигателя.
- Наличие системы охлаждения. Обычно особого внимания на то, как проводится охлаждение, никто не уделяет. Однако при постоянной работе оборудования, к примеру под солнцем, следует задуматься о том, что модель должна быть предназначена для продолжительной работы под нагрузкой при тяжелых условиях.
- Целостность корпуса и его вид,год выпуска – основные моменты, на которые уделяют внимание при покупке двигателя бывшего употребления. Если имеются дефекты корпуса, велика вероятность того, что конструкция имеет повреждения и внутри. Также, не стоит забывать о том, что подобное оборудование с годами теряет свой КПД.
- Особое внимание нужно уделятькорпусу, так как в некоторых случаях можно провести крепление только в определенном положении. Самостоятельно создать посадочные отверстия, приварить уши для крепления практически невозможно, так как нарушение целостности корпуса не допускается.
- Вся информация об электродвигателе находится на пластине, которая прикрепляется к корпусу. В некоторых случаях, есть только маркировка, по расшифровке которой можно узнать основные показатели работы.
В заключение отметим, что многие двигатели, которые были произведены несколько десятилетий назад, зачастую проходили восстановительные работы. От качества проведенной восстановительной работы зависят показатели электродвигателя.
Двигатель на постоянных магнитах
Согласно закону сохранения энергии, любой современный эл. привод не может иметь КПД выше 100%, потому как часть энергии нужно потратить на собственные нужды. Решить этот вечный вопрос призван двигатель на постоянных магнитах (униполярный, линейный, роторный, гравитационный и т. п), в котором механическое перемещение компонентов происходит за счет их взаимодействия на уровне магнитных свойств.
Принцип действия вечного магнитного движителя
Большинство современных эл. двигателей используют принцип трансформации эл. тока в механическое вращение ротора, а вместе с ним и приводного вала. Это значит, что любой расчет покажет КПД меньше 100%, а сам агрегат является зависимым, а не автономным. Та же ситуация наблюдается в случае генерирующего устройства. Здесь уже момент вращения вала, которое происходит за счет тепловой, ядерной, кинетической или потенциальной энергии движения среды, приводит к выработке электрического тока на коллекторных пластинах.
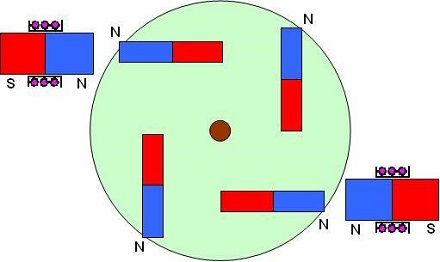
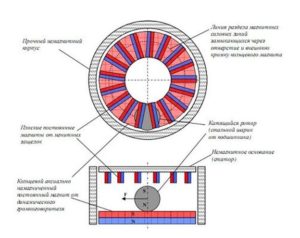 Двигатель на постоянных магнитах использует совершенно иной подход к работе, который нивелирует или сводит к минимуму необходимость в сторонних источниках энергии. Описать принцип работы такого двигателя можно на примере «беличьего колеса». Для изготовления демонстративной модели не требуются особые чертежи или расчет надежности. Необходимо взять один постоянный магнит тарельчатого (дискового) типа, полюса которого располагаются на верхней и нижней плоскостях пластин. Он будет служить основой конструкции, к которой нужно добавить два кольцевых барьера (внутренний, внешний) из немагнитных, экранирующих материалов. В промежуток (дорожку) между ними помещается стальной шарик, который будет играть роль ротора. В силу свойств магнитного поля, он сразу же прилипнет к диску разноименным полюсом, положение которого не будет меняться при движении.
Двигатель на постоянных магнитах использует совершенно иной подход к работе, который нивелирует или сводит к минимуму необходимость в сторонних источниках энергии. Описать принцип работы такого двигателя можно на примере «беличьего колеса». Для изготовления демонстративной модели не требуются особые чертежи или расчет надежности. Необходимо взять один постоянный магнит тарельчатого (дискового) типа, полюса которого располагаются на верхней и нижней плоскостях пластин. Он будет служить основой конструкции, к которой нужно добавить два кольцевых барьера (внутренний, внешний) из немагнитных, экранирующих материалов. В промежуток (дорожку) между ними помещается стальной шарик, который будет играть роль ротора. В силу свойств магнитного поля, он сразу же прилипнет к диску разноименным полюсом, положение которого не будет меняться при движении.
Статор представляет собой условно пластину из экранируемого материала, на которую по кольцевой траектории крепят постоянные магниты, например, неодимовые. Их полюса расположены перпендикулярно по отношению к полюсам дискового магнита и ротора. В результате, когда статор приближается к ротору на определенное расстояние, возникает поочередное притяжение, отталкивание в магнитном поле, которое формирует момент затем перерастает во вращение шарика по кольцевой траектории (дорожке). Пуск и остановка происходят за счет приближения или отдаления статора с магнитами. Этот вечный двигатель на постоянных магнитах будет работать до тех пор, пока они не размагнитятся. Расчет ведется относительно размера коридора, диаметров шарика, пластины статора, а также цепи управления на реле или катушках индуктивности.
На подобном принципе действия было разработано немало моделей действующих образцов, например, синхронных двигателей, генераторов. Наиболее известными среди них являются двигатели на магнитной тяге Тесла, Минато, Перендев, Говарда Джонсона, Лазарева, а также линейные, униполярные, роторные, цилиндровые и т. д.
Рассмотрим каждый из примеров подробнее.
Магнитный униполярный двигатель Тесла
Выдающийся ученый, ставший в свое время пионером в области снабжения эл. током, асинхронных электродвигателей на переменном токе, не обделил своим вниманием и расчетом вопрос вечного источника энергии. В научной среде это изобретение именуется иначе, как униполярный генератор Тесла.
Первоначально расчет данного типа устройства вел Фарадей, но его прототип при сходном принципе действия не обладал должной эффективностью, стабильностью работы, то есть не достиг цели. Термин «униполярный» означает, что в схеме агрегата кольцевой, дисковый (пластина) или цилиндровый проводник расположен в цепи между полюсами постоянного магнита.
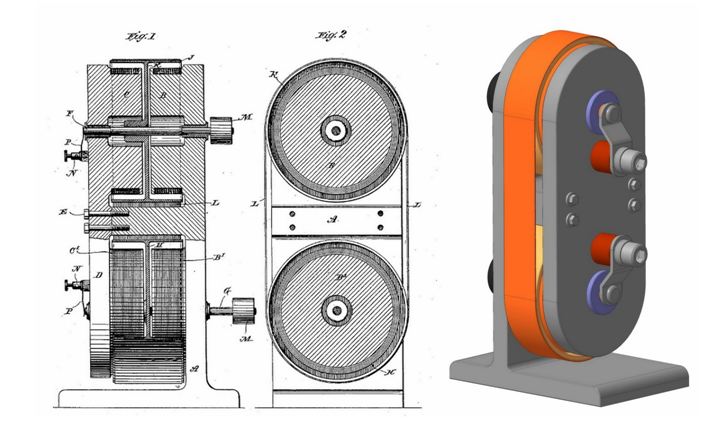
Магнитный двигатель Тесла и его схема
На схеме, которая была представлена в оригинальном патенте, есть конструкция с двумя валами, на которых размещаются две пары магнитов: В, В создают условно положительное поле, а С, С – отрицательное. Между ними располагаются униполярные диски с отбортовкой, используемые в качестве генерирующих проводников. Оба униполярных диска связаны между собой тонкой металлической лентой, которая может быть в принципе использована, как проводник (в оригинале) или для вращения диска.
Двигатель Минато
Еще одним ярким примером использования энергии магнетизма для самовозбуждения и автономной работы является сегодня уже серийный образец, разработанный более тридцати лет назад японцем Кохеи Минато. Его отличают бесшумность и высокая эффективность. По собственным заявлениям Минато, самовращающийся магнитный двигатель подобной конструкции имеет КПД выше 300%.

Двигатель Минато
Ротор имеет форму диска или колеса, на котором под определенным углом располагаются магниты. Когда к ним подводится статор с большим магнитом, возникает момент и колесо Минато начинает вращаться, используя попеременное сближение и отталкивание полюсов. Чем ближе статор к ротору, тем выше момент и скорость вращения. Питание осуществляется через цепь реле прерывателя.
Для предотвращения импульсов и биения при вращении колеса Минато, используют реле стабилизаторы и сводят к минимуму потребление тока управляющего эл. магнита. Недостатком можно считать отсутствие данных по нагрузочным характеристикам, тяге, используемых реле цепи управления, а также необходимость периодического намагничивания, о которой, кстати, тоже от Минато информации нет.
Может быть собран, как и остальные прототипы, экспериментально, из подручных средств, например, деталей конструктора, реле, эл. магнитов и т. п.
Двигатель Лазарева
Устройство двигателя Лазарева
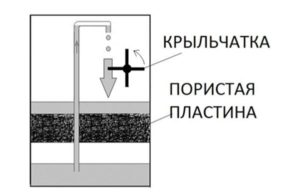
Отечественный разработчик Николай Лазарев создал работающий и довольно простой вариант агрегата, использующего магнитную тягу. Его двигатель или роторный кольцар, состоит из емкости, разделенной пористой перегородкой потока на верхнюю и нижнюю части. Они сообщаются между собой за счет трубки, по которой из нижней камеры в верхнюю идет поток воды/жидкости. В свою очередь поры обеспечивают гравитационное перетекание вниз. Если под потоком жидкости поместить колесико, на лопастях которого будут закреплены магниты, то получиться добиться цели потока – вращения и создания постоянного магнитного поля. Схема роторного двигателя Николая Лазарева используется для расчета и сборки простейших самовращающихся устройств.
Магнитный мотор Говарда Джонсона
Магнитный мотор Говарда Джонсона
В своей работе и следующем за ней патенте на изобретение, Говард Джонсон использовал энергию, генерируемую потоком непарных электронов, присутствующих в магнитах для организации цепи питания мотора. Статор Джонсона представляет собой совокупность множества магнитов, дорожка расположения и движения которых будет зависеть от конструктивной компоновки агрегата Говарда Джонсона (линейной или роторной). Они закрепляются на специальной пластине с высокой степенью магнитной проницаемости. Одноименные полюса статорных магнитов направляются в сторону ротора. Это обеспечивает поочередное притяжение и отталкивание полюсов, а вместе с ними, момент и физическое смещение элементов статора и ротора относительно друг друга.
Организованный Говардом Джонсоном расчет воздушного зазора между ними позволяет корректировать магнитную концентрацию и силу взаимодействия в большую или меньшую сторону.
Генератор Перендева

Генератор Перендева
Еще одним неоднозначным примером действия магнитных сил является самовращающийся магнитный двигатель Перендев. Его создатель Майк Брэди, до того, как в его отношении начали уголовное производство, даже успел обзавестись патентом, создать одноименную фирму (Перендев) и поставить дело на поток. Если анализировать представленную в патенте схему и принцип, или чертежи самодельных эл. двигателей, то ротор и статор имеют форму диска и внешнего кольца. На них по кольцевой траектории размещают отдельные магниты, соблюдая определенный угол относительно центральной оси. За счет взаимодействия поля отдельных магнитов статора и ротора Перендев, возникает момент и происходит их взаимное перемещение (вращение). Расчет цепи магнитов сводится к определению угла расхождения.
Синхронный двигатель на постоянных магнитах

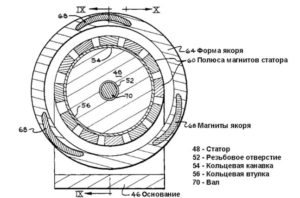
Устройство синхронного двигателя на магнитах
Одним из основных видов электродвигателей является синхронный, частота вращения магнитных полей статора и ротора которого равны. У обычного электромагнитного мотора обе эти части состоят из обмоток на пластинах. Но если конструкцию якоря поменять и вместо катушки поставить постоянные магниты, то можно получить интересную, эффективную, действующую модель синхронного двигателя. Статор имеет привычную компоновку магнитопровода из пластин и обмоток, в которых способно генерироваться вращающееся магнитное поле от электрического тока. Ротор создает постоянное поле, которое взаимодействует с предыдущим, и создает крутящий момент.
Также следует отметить, что в зависимости от схемы, относительное расположение статора и якоря могут меняться, например, последний будет выполнен в форме внешней оболочки. Для пуска мотора от тока из сети используется цепь из магнитного пускателя (реле, контактора) и теплового защитного реле.
Чипгуру
- Форум
- Правила форума
- Правила для Редакторов
- Правила конкурсов
- Руководство барахольщика
- Ликбез по форуму
- Изменить цвет форума
- Как вставлять фотографии
- Как вставлять ссылки
- Как вставлять видео
- Как обозначить оффтоп
- Как цитировать
- Склеивание сообщений
- Значки тем
- Подписка на темы
- Автоподписка на темы
- БиБиКоды (BBCode)
- Полигон для тренировок
- Калькуляторы
- Металла
- Обороты, диаметр, скорость
- Подбора гидроцилиндров
- Развертки витка шнека
- Расчёт треугольника
- Теплотехнический
- Усилия гибки
- Каталоги
- Подшипников
- Универсально-сборные пр.
- УСП-12
- Справочники
- Марки стали и сплавы
- Открытая база ГОСТов
- Применимость сталей
- Справочник конструктора
- Справочник ЧГ сталей
- Сравнение материалов
- Стандарты резьбы
- Таблицы
- Диаметров под резьбу
- Конусов Морзе
- Номеров модульных фрез
- Темы без ответов
- Активные темы
- Поиск
- Наша команда
О принципе работы электродвигателей с постоянными магнитами.

О принципе работы электродвигателей с постоянными магнитами.
Сообщение #1 T-Duke » 20 сен 2016, 14:22
Принцип действия двигателей с постоянными магнитами.
Довольно часто встречал неправильное понимание сути работы двигателей с магнитами, как ДПТ, так и бесколлекторных. Чтобы не распыляться в разных местах все время делая одно и то же, решил запилить эту тему.
Двигатели с постоянными магнитами на сегодняшний день имеют самые высокие эксплуатационные показатели и быстро набирают популярность в применениях где требуются высокие удельные характеристики. То есть там, где велико отношение номинальной мощности развиваемой двигателем к его массе и отношение крутящего момента создаваемого двигателем к его массе. Постараюсь простыми словами и минимумом формул, донести самую суть и возможно затем разные нюансы.
Первый принцип работы двигателя — сила Ампера.
Сила Ампера, является частным случаем силы Лоренца и возникает в электрических проводниках расположенных в магнитном поле, но только когда в этих проводниках протекает электрический ток. Сила Ампера — это векторная величина. То есть имеет направление действия. И действует она ортогонально линиям магнитного поля, пересекающего проводник с током.

На рисунке, тоненькие желтые стрелки это силовые линии магнитного поля, зеленый вектор — направление электрического тока, черный вектор — сила Ампера.
Именно сила Ампера и ответственна, за создание крутящего момента двигателя. При чем, неважно находится ли проводник в свободном пространстве заполненном воздухом, вакуумом, или ферромагнитной средой. Сила ампера возникает всегда, если есть проводник, ток, и магнитное поле.
Таким образом зная длину рабочей части провода в двигателе, ток протекающий через обмотку двигателя и индукцию магнитного поля, можно определить силу Ампера, которая будет действовать на ротор двигателя. Например, если длина рабочей части провода 10м, сила протекающего тока 10А, индукция магнитного поля 1Тл, то сила ампера в этом случае составит величину 100Н.
То есть сила Ампера равна длине провода, умноженной на силу тока, протекающего через проводник, умноженной на индукцию магнитного поля.
Итак сила Ампера приводит ротор двигателя во вращение, создавая крутящий момент. Этот момент определяется силой Ампера, приложенной к радиусу ротора двигателя. Если сила Ампера 100Н, а радиус ротора 0.1м, то момент составит величину 100Н*0.1м=10Нм.
Второй принцип работы двигателя — закон электромагнитной индукции.
Этот закон гласит, что если на проводник расположенный в пространстве, действует изменяющееся магнитное поле, то в проводнике будет возникать электродвижущая сила. Именно это явление позволяет любому двигателю с постоянными магнитами выступать в роли генератора. То есть при вращении ротора, всегда возникает некая ЭДС. При чем не важно как движется ротор, или принудительно, или по инерции, или под действием силы Ампера.
Во вращающемся двигателе в обмотках всегда возникает ЭДС. Если принудительно приводить ротор двигателя во вращение, то двигатель становится генератором, и ЭДС которая появляется в обмотке, называется генераторной-ЭДС. Если обмотку такого генератора замкнуть на нагрузку, то через обмотку потечет ток, вызванный этой генераторной ЭДС.
Если рассматривать двигательный режим, то следует помнить, что ЭДС наводящаяся в обмотке двигателя по причине вращения ротора, направлена таким образом, чтобы противодействовать напряжению питания двигателя. Поэтому ее называют противо-ЭДС.
Третий принцип работы двигателя — разность между напряжением питания двигателя и противо-ЭДС.
Идеальный двигатель.
Для большей ясности, рассмотрим сначала идеальный двигатель, обмотка которого не имеет электрического сопротивления. Допустим, обмотка двигателя выполнена из сверхпроводника, рабочая длина которого 10м. Индукция магнитов ротора равна 1Тл. И допустим обмотка такого двигателя, не теряет сверхпроводящих свойств, при любых, даже гигантских значениях тока. Чтобы не усложнять все, предположим, что у нас щеточный двигатель, у которого так же отсутствуют сопротивление щеток и электрические потери в коллекторе. Ну и допустим у нас есть идеальный источник дающий любой ток на выходе, который затребует нагрузка. Это абстракция, двигатель и источник слишком идеальны, но она удобна для рассмотрения принципов работы двигателя.
Допустим ротор такого двигателя нагружен на большую инертную нагрузку, которая не дает ротору мгновенно ускориться.
Рассмотрим замедленный процесс работы двигателя:
-
В начальный момент времени, ротор покоится. Поэтому величина противо-ЭДС в обмотках двигателя равна нулю.
-
Дальше подаем напряжение на обмотку двигателя. Допустим величиной 1В. Так как противо-ЭДС равна нулю, то из напряжения питания двигателя вычитать нечего. Значит к обмотке будет приложено полное напряжение источника питания.
-
Так как сопротивление обмотки двигателя равно нулю, то даже от напряжения 1В, в обмотке может протекать гигантский ток. Благо у каждой обмотки, даже у прямого провода есть индуктивность. Она будет сдерживать скорость нарастания тока. Но предел тока неограничен. За достаточный промежуток времени, ток может набрать любую заданную гигантскую величину. Например, если индуктивность обмотки двигателя равна 100мкГн, то скорость нарастания тока, при напряжении питания 1В, составит 10000А/с. То есть по сути с течением времени, ток наберет любую величину, достаточную для того, чтобы сдвинуть ротор, преодолевая инерцию нагрузки и саму нагрузку.
-
Итак, мы подали напряжение 1В, ротор покоился, ток в обмотке начал резко нарастать, и в конце-концов, сила Ампера проводников обмотки, начинает превышать силу противодействия нагрузки и ее инерцию и ротор начинает свое вращение, какой бы ни была нагрузка. Например если ток через обмотку составит величину 1000А, то окружная сила ротора составит величину 10000Н, или 1000кгс, в общем одну тонну усилия. А ток в случае отсутствия сопротивления может быть сколь угодно большим. Поэтому какая бы ни была нагрузка на валу, двигатель все равно провернется, если прочность материала двигателя позволит это сделать.
-
Но как только ротор приходит в движение, в обмотке двигателя начинает генерироваться противо-ЭДС, которая моментально начинает вычитаться из напряжения питания.
Допустим немного разогнавшись, ротор приобрел окружную скорость движения 0.05м/с. При таком значении скорости, величина противо-ЭДС рассматриваемого двигателя, составит 0.5В и будет вычтена из напряжения питания. Таким образом, напряжение, которое «увидит» обмотка двигателя, уже уменьшится с 1 до 0.5В. Скорость нарастания тока, так же уменьшится до 5000А/с. Скорость ускорения ротора замедлится, но ток все равно будет нарастать, хоть и с меньшей величиной.
-
Допустим через некоторое время, двигатель набрал окружную скорость 0.099м/с. Величина противо-ЭДС в обмотке ротора, составит величину 0.99В. Разница между напряжением питания и противо-ЭДС составит величину 0.01В. И это напряжение будет приложено к обмотке двигателя.
Но даже это напряжение способно вызвать любой ток, при нулевом сопротивлении обмотки. К тому же, скорость нарастания тока, все равно будет значительная 100А/с И ток будет продолжать расти, увеличивая силу Ампера, крутящий момент и разгоняя ротор с нагрузкой.
-
И вот когда ротор полностью разгонится до такой скорости, при которой противо-ЭДС станет равной 1В, тогда разница между противо-ЭДС и напряжением питания станет нулевой и только в этом случае, нарастание тока в обмотке двигателя прекратится.
Ну а дальше ротор проскочит точку равновесия и двигатель превратися в генератор, начиная тормозить разогнанную массу. И в конце концов, все устаканится на таких оборотах, когда ток, протекающий через обмотки, будет покрывать потери на трение и сопротивление вращению нагрузки.
Как переделать асинхронный электродвигатель в мощный электрогенератор
Многие задумываются о получении бесплатной электроэнергии, преображая в нее кинетическую энергию ветра или воды. Продаваемые для этого ветрогенераторы или мини ГЭС достаточной мощности стоят очень дорого. Чтобы сэкономить, генератор для своей установки по производству бесплатной энергии можно сделать на базе обычного электродвигателя.
Что потребуется:
- асинхронный трехфазный электродвигатель;
- неодимовые прямоугольные магниты — http://ali.pub/4yy1yd
- эпоксидная смола.
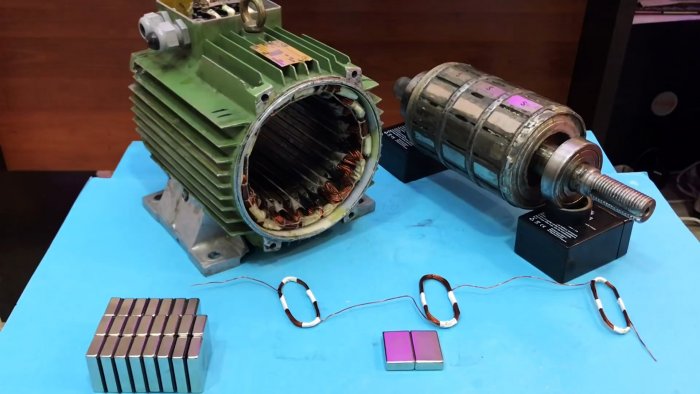
Процесс изготовления генератора
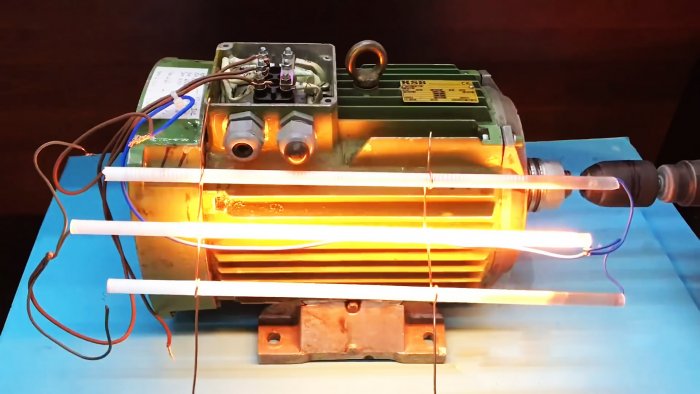
Чтобы сделать генератор, нужно разобрать асинхронный трехфазный мотор. У него извлекается ротор, чтобы оснастить его в дальнейшем постоянными магнитами.

Далее нужно определиться с количеством и размером магнитов. Они должны быть в виде прямоугольников. Причем по ширине каждый магнит должен полностью перекрывать 2 паза на сердечнике статора, то есть ложиться на 3 шипа. В таком случае он будет воздействовать своим полем сразу на 3 катушки обмотки статора. Для двигателя из данного примера подходит магнит шириной 25 мм.
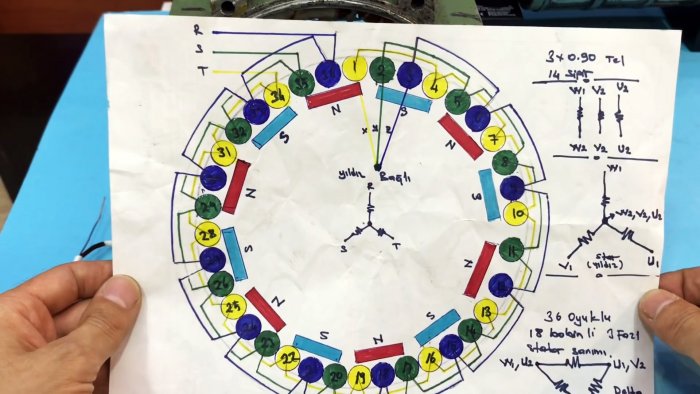
Сердечник данного статора состоит из 12 групп, в которые входят по 3 шипа. Таким образом, на ротор нужно прикрепить соответственно 12 рядов магнитов. Между ними чередуется полярность. Магниты каждого ряда должны выстраиваются в линию соответствующую по длине продолжительности сердечника ротора. Так как для изготовления генератора были выбраны магниты 40х25х10 мм, то их помещается по 3 в ряд.

Нужно закрепить магниты на якоре с помощью эпоксидного клея. Так как от этого диаметр ротора увеличится, то его возможно понадобится перед этим проточить, чтобы он после добавления магнитов мог поместиться в статор.
Такое количество неодимовых магнитов на роторе делает проблематичным его установку в статор, так как они притягиваются. Есть риск пораниться при установке, поэтому нельзя помещать пальцы между притягивающимися сердечниками.

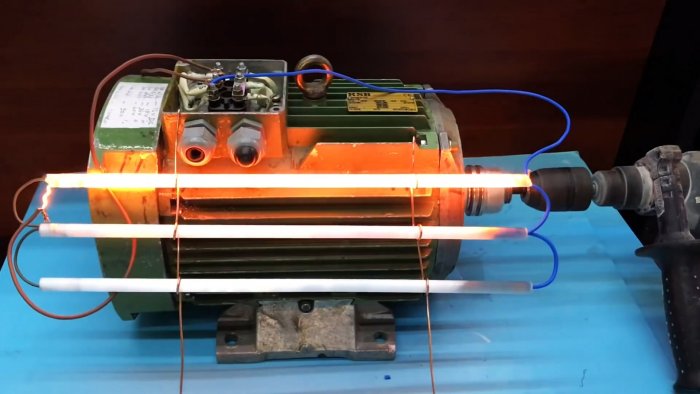
Двигатель собирается. После этого нужно доработать его клеммную колодку. В ней имеется 6 выводов обмоток, которые нужно подключить по схеме звезда. Необходимо 3 из них соединить в один узел. Тогда между ним и любым другим оставшийся концом обмотки будет 220В.

После этого генератор можно подключать с помощью редуктора к ветряку или делать из него мини ГЭС. Также возможно напрямую соединить его с двигателем внутреннего сгорания. При достаточных оборотах от него можно питать практически любые бытовые электроприборы.
Смотрите видео
Генератор на постоянных магнитах
В современных условиях предпринимаются постоянные попытки усовершенствования электромеханических устройств, снижения их массы и габаритных размеров. Одним из таких вариантов является генератор на постоянных магнитах, представляющий собой достаточно простую конструкцию с высоким коэффициентом полезного действия. Основная функция данных элементов заключается в создании вращающегося магнитного поля.
- Виды и свойства постоянных магнитов
- Принцип работы устройств
- Постоянные магниты в конструкциях генераторов
Виды и свойства постоянных магнитов
С давних пор были известны постоянные магниты, получаемые из традиционных материалов. В промышленности впервые начал использоваться сплав алюминия, никеля и кобальта (алнико). Это дало возможность применять постоянные магниты в генераторах, двигателях и других видах электрооборудования. Особенно широкое распространение получили ферритовые магниты.
Впоследствии были созданы самарий-кобальтовые жесткие магнитные материалы, энергия которых обладает высокой плотностью. Вслед за ними произошло открытие магнитов на основе редкоземельных элементов – бора, железа и неодима. Плотность их магнитной энергии значительно выше, чем самарий-кобальтового сплава при значительно низкой стоимости. Оба вида искусственных материалов успешно заменяют электромагниты и применяются в специфических областях.Неодимовые элементы относятся к материалам нового поколения и считаются наиболее экономичными.
Принцип работы устройств
Главной проблемой конструкции считался возврат вращающихся деталей в исходной положение без существенных потерь крутящего момента. Данная проблема была решена с помощью медного проводника, по которому был пропущен электрический ток, вызывающий притяжение. При отключении тока, действие притяжения прекращалось. Таким образом, в устройствах этого типа использовалось периодическое включение-отключение.
Повышенный ток создает увеличенную силу притяжения, а та, в свою очередь, участвует в выработке тока, проходящего через медный проводник. В результате циклических действий, устройство, кроме совершения механической работы, начинает производить электрический ток, то есть выполнять функции генератора.
Постоянные магниты в конструкциях генераторов
В конструкциях современных устройств, кроме постоянных магнитов применяются электромагниты с постоянным электрическим током в катушке. Такая функция комбинированного возбуждения позволяет получить необходимые регулировочные характеристики напряжения и частоты вращения при пониженной мощности возбуждения. Кроме того, уменьшается величина всей магнитной системы, что делает подобные устройства значительно дешевле по сравнению с классическими конструкциями электрических машин.
Мощность устройств, в которых используются данные элементы может составлять только несколько киловольт-ампер. В настоящее время ведутся разработки постоянных магнитов с лучшими показателями, обеспечивающими постепенный рост мощности. Подобные синхронные машины используются не только в качестве генераторов, но и как двигатели различного назначения. Они широко применяются в горнодобывающей и металлургической отрасли, тепловых станциях и других сферах. Это связано с возможностью работы синхронных двигателей с различными реактивными мощностями. Сами они работают с точной и постоянной скоростью.

Станции и подстанции функционируют вместе со специальными синхронными генераторами, которые в режиме холостого хода обеспечивают выработку только реактивной мощности. В свою очередь, реактивная мощность обеспечивает работу асинхронных двигателей.
Генератор на постоянных магнитах работает по принципу взаимодействия магнитных полей движущегося ротора и неподвижного статора. Не до конца изученные свойства этих элементов позволяют работать над изобретением других электротехнических устройств, вплоть до создания безтопливного вечного двигателя.